有点难受,但是还是入门了,啊,站在一堆门的门口、伸着脖子往里看的感觉真是滑稽
在Ubuntu20.04中安装ROS Noetic
参考:在Ubuntu20.04中安装ROS Noetic - 简书
一、安装ROS Noetic
1. 安装源
1
| sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
|
2. 安装KEY
1
| sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
|
3. 更新源
4. 安装 ROS
1
| sudo apt install ros-noetic-desktop-full
|
5. 环境变量
1
2
| echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
|
二、安装测试
1. 启动
2. 打开小乌龟
1
| rosrun turtlesim turtlesim_node
|
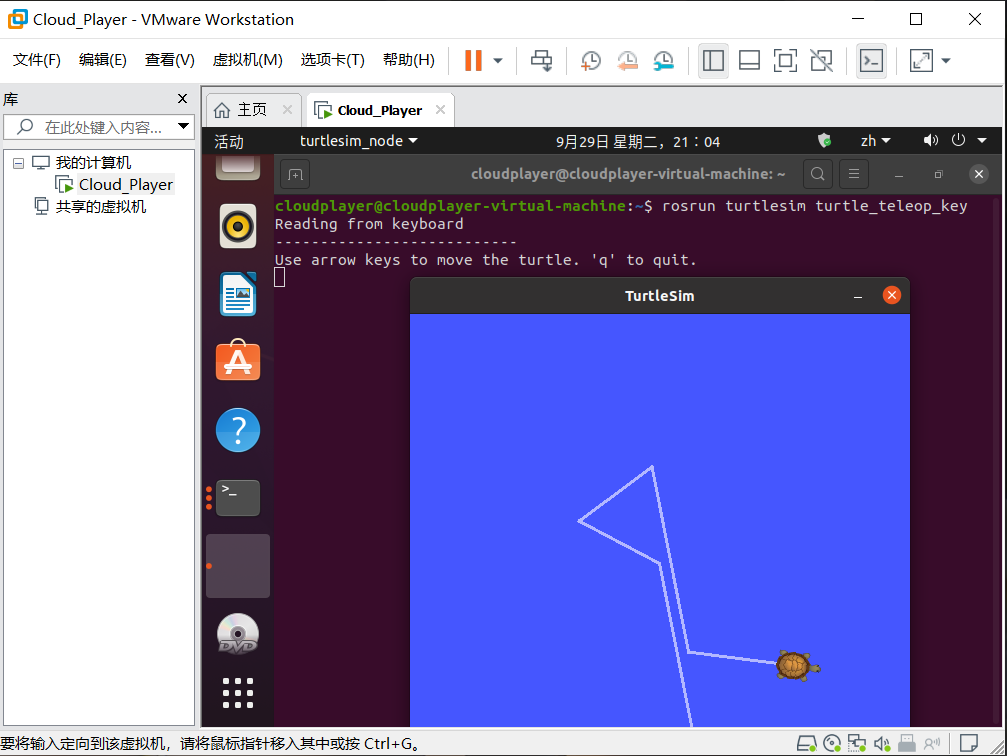
3. 键盘控制小乌龟
1
| rosrun turtlesim turtle_teleop_key
|

