B 站 UP 孤独野驴:
DCS 入门 模拟飞行 苏25T基础教学第一期下载完成要干什么 认识仪表 起飞 基础理论 话术
DCS 苏25T第二期基础教学 导航 降落 基础理论 侧滑仪 HSI ADI 入门 模拟飞行
DCS 苏25T第三期基础教学 盲降 ILS仪表着陆 新飞行员入门 模拟飞行
DCS 苏25T 第四期基础教学 添地 CCIP CCRP 子母弹布撒器 火箭弹 机炮 机炮挂架
DCS 苏25T 基础教学第五期 电视制导武器 激光制导武器 水星夜视吊舱 添地
DCS 苏25T教学第六期 反辐射导弹 RWR 电子对抗 空空导弹
【本文数据皆为 DCS 教程中给出】
¶从入门到起飞
-
下载 DCS World
-
参考系统配置

-
找到 Su-25T 的手册
参考地址:
D:\SteamLibrary\steamapps\common\DCSWorld\Mods\aircraft\Su-25T\Doc\DCS World Su-25T Flight Manual CN.pdf -
Su-25T 基本信息
Su-25Т 蛙足是苏联研发的一款可以携带反坦克武器的全天候攻击机 -
认识节流阀与操纵杆

- 操纵杆的控制
- 向后拉为带杆,往前推叫做推杆
带杆,升降舵向上翘起,使飞机的仰角增加
推杆,升降舵向下偏转,增加俯角 - 往左叫压杆,称正压杆,往右也是压杆,称反压杆,正杆与反杆是指的逆时针的顺序
正压杆飞机向左滚转,反压杆飞机向右滚转
- 向后拉为带杆,往前推叫做推杆
- 认识钟表店

- 起落架控制杆
- 自动驾驶 (ACS)控制面板
- 迎角(AOA)指示器与加速度表(“G 表”)
- 指示空速表(IAS)
- 姿态指引指示器(ADI)
- 垂直速度表(VVI)
- 发动机转速表(每分钟转动次数或者 RPM)
- 油量表
- “EKRAN” 内置检测系统显示屏
- SPO-15“堡优札”雷达告警接收器(RWR)面板
- IТ-23М 阴极管(CRT)电视(TV)显示屏
- 飞行时钟
- “Sukhogruz”红外(IR)干扰指示灯
- 武器系统控制面板(WCS)
- 襟翼、前缘缝翼、减速板以及起落架配置指示器
- 无线电高度表
- 气压高度表
- 水平状态指示器(HSI)
- 俯仰、滚转和偏航回中(起飞)配平指示灯
- 武器状态 面板
- 发动机温度表
- 液压表
- 告警灯


-
具体看几个飞行仪表
-
IAS – TAS 空速表
IAS - TAS 空速表在内圈显示航空器的真空速(TAS),在外圈显示航空器的指示空速(IAS)。速度范围从 0 到 1100 公里/小时

- 配置指示器
机械设备配置指示器显示起落架,襟翼,以及减速板的位置。如果起落架不能成功放下或者收起,指示器中间的红灯亮起

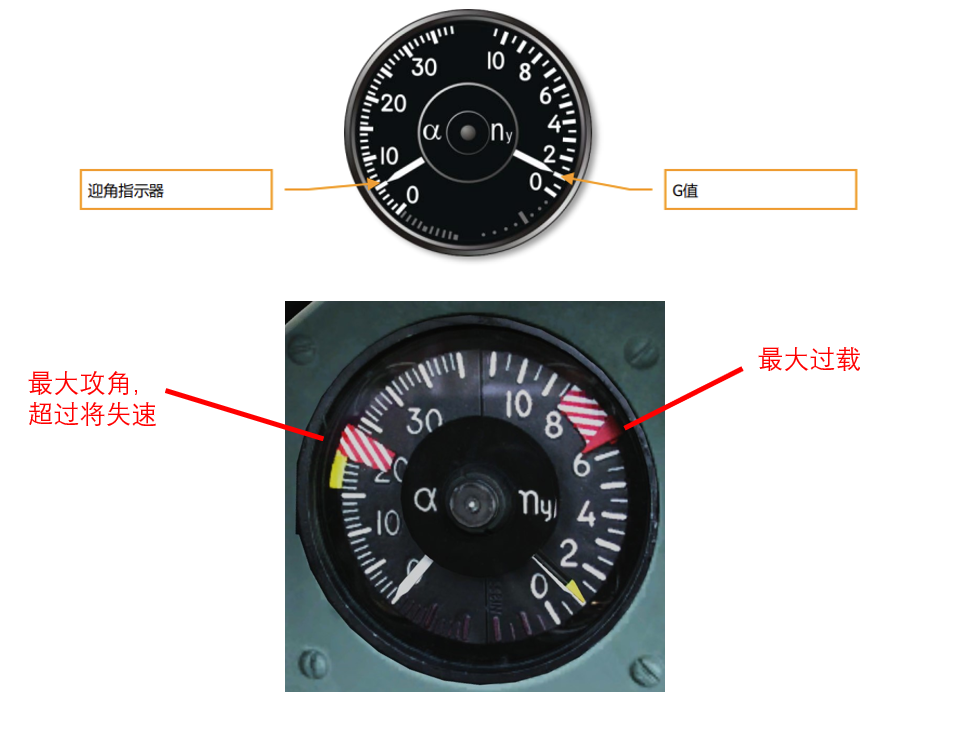
- AOA(迎角)指示器和加速度表
迎角(AoA)指示器和加速度表显示当前的迎角和 G 值。仪表左边显示迎角度数,右边显示 G 值(迎角也叫攻角,攻角是指飞机的升力方向矢量与飞机纵轴之间的夹角,攻角过大飞机将失速)
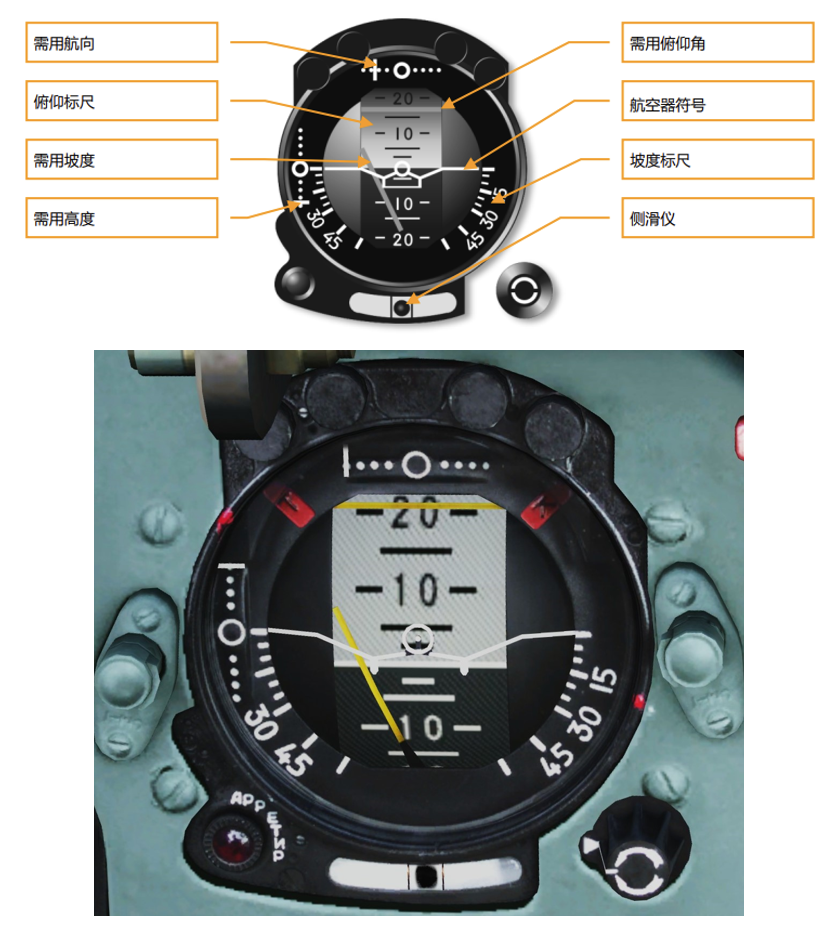
- 姿态指引指示器(ADI)
姿态指引指示器(或指引地平仪)(ADI)显示航空器当前的俯仰和滚转角度。在仪表的底部是侧滑指示。用蹬舵来消除侧滑,飞行时要把侧滑球保持在中间。在仪表中间一横一竖的两条黄线是到达下一个航路点的需用滚转角和俯仰角。 两条线都在中间时,表示航空器处在正确航线上。着陆时,W 形状的下滑道指示器提供仪表着陆系统(ILS)的方向
- 水平状态指示器(HSI)
水平状态指示器(HSI)提供航空器在预定航线的垂直视野信息。罗盘可以旋转,当前航向显示在顶部。航线指针指示需用航向,航向指针指向下一个航路点。到下一个航路点的距离和需用航向显示在仪表顶部的两个数字窗口中。仪表中间是 ILS 航向信标及下滑道指示

- 垂直速度表(VVI)
垂直速度表测量航空器的垂直速度,爬升率和下降率。侧滑指示器是 ADI 上侧滑指示的备份。转弯指示器显示转弯的方向,但显示的转弯速率只是近似值(垂直速度表能判断飞机是否平飞)

- 无线电高度表
无线电高度表指示离地面的高度,范围是 0 到 1500 米
区别无线电(雷达)高度表与气压高度表,气压高度表指利用飞行器所处气压环境测量出的高度,是相对海平面气压的,所以测出来的高度也是相对海平面的高度

- 转速表
转速表用来测量两台发动机转子的转速。测量转子最大转速的百分比(即测量的是一个百分数)

-
接下来,重点再看看 HUD(平视显示系统)
Su-25T 有数个运行模式。平视显示器(HUD)上的一些基本符号是多数模式通用的 -
Su-25T 基本 HUD 符号
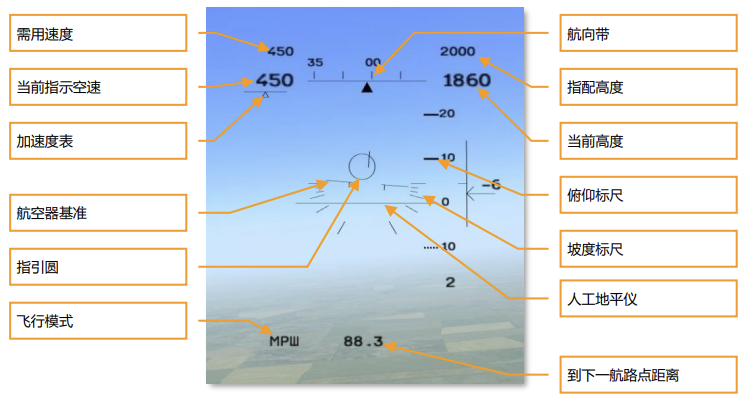
- HUD 中央的航空器基准用旋转来指示航空器的坡度和滚转
- 航向条显示在 HUD 的顶部,标记以十度为刻度(例如:数字“35”指示航向为 350 度)
- 航向条的左侧是指示空速(IAS),到下一航路点的指配空速(取决于运行子模式)显示在指示空速的正上方
- 一个加速度表显示在指示空速的正下方,形式为一个条形标尺和三角形标记,标记在中心右侧表示加速;在中心左侧表示减速
- 在航向带的右侧是以米为单位的当前飞行高度,离地高度(AGL)低于 1500 米时,显示 1 米精度的无线电高度,离地高度高于 1500 米时,显示 10 米精度的气压海拔高度(ASL)。下一航路点的指配高度(取决于运行子模式)显示在当前飞行高度的正上方
- 当航空器在指配的飞行路径上,指引圆与 HUD 中央的航空器基准对齐,当航空器偏离指配飞行路径,指引圆指示回到路径的方向
- 俯仰带位于航空器基准的右侧,通过这个带,可以参考 HUD 上的航空器基准来读出航空器的俯仰
- 俯仰带的右侧是垂直速度表(VVI),航空器在 ±30 米/秒以内的爬升或下降率通过箭头和数值显示,当垂直速度超过 30 米/秒时,箭头停在 VVI 的限位,数值闪烁
- 当前运行飞行模式显示在 HUD 的左下角
- 到下一航路点的距离以公里显示在 HUD 的底部
- 光线太强可打开遮阳板(右 SHIFT + H)
-
飞机启动、滑行和起飞
在本节中介绍 Su-25T 冷启动的步骤,以及滑行到跑道并起飞的过程 -
启动(冷启动)
开启电源:右 Shift + L,使得 HUD 与其他仪表和驾驶舱灯加电激活了,在滑出前确保航电上电 3 分钟,保证水平状况仪的陀螺仪正确校准
开启航行灯:右 Ctrl + L
关闭座舱盖:左 Ctrl + C
确保油门杆收到底,启动两个发动机
启动左发:右 Alt + Home,左发动机指示灯亮,转速表左发的指针动
启动右发:右 Ctrl + Home,右发动机指示灯亮,转速表右发的指针动
发动机指示灯熄灭,代表对应发动机已完成启动并就绪
将襟翼放置至起飞位:左 Shift + F -
滑行
缓慢向前推油门杆,或键盘按 Page Up 键来增加油门
一般使转速达到 60 %,根据携带燃料的多少(重量影响)调整
(减小油门则是往回收油门杆,或着按 Page Down,W 键为机轮刹车)
转向为按 Z 左转按 X 右转,或者蹬左或右边的脚舵
滑行至跑道,过程中注意控制速度,收一收油(参考转速 50 %)
速度过快时转弯飞机容易侧翻
上跑道后使 HUD 准心对准跑道轴线后,刹车
(F1 为驾驶舱视角,F2 可切换至外部视角,建议保持驾驶舱视角) -
起飞
踩住刹车,推油
当发动机转速达到 100 %,即指针指到 10 的位置时,立即松刹车
(机轮制动器可以在发动机转速不超过 80% 的情况下固定住航空器)
使用脚舵(轻踏方向舵踏板)使得飞机保持在跑道中线上
当速度超过 200 km/h 后(速度在 HUD 上有显示),轻轻带杆(轻柔向后拉杆)
【注:抬轮速度】160-180 公里/小时 - 正常起飞重量 / 200-220 公里/小时 - 最大起飞重量
当飞机抬头后停止带杆,松开一点,保持这个角度不动
按下 G 收起起落架,并收一点油
继续向前飞行,并按左 Ctrl + F 收起襟翼 -
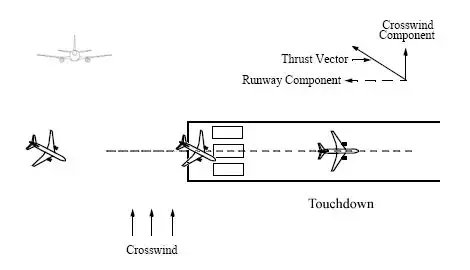
有侧风起飞
Su-25T 可以在干跑道上最大 11-14 米/秒的侧风中保持稳定,在侧风中起飞时,航空器会沿着侧风方向带一点坡度(例如,左侧风使得左机翼的升力比右机翼大,左机翼上扬形成右坡度),为了保持机翼水平,需要反向压杆(朝来风方向压杆)来进行修正(即有左侧风时,向左压杆抵消右坡度),且需要蹬舵以维持飞机沿跑道中线滑跑 -
配平
介绍一下什么是配平:
飞机配平就是利用装置对操作面(副翼、升降舵、方向舵)进行微调,来达到稳定飞机的姿态及航向的目的,这样可以降低飞行员调整或保持飞行姿态所需要的力量
具体来说就是
保持姿态稳定:飞机的配平可以帮助保持飞行姿态,使其在空中保持平稳的飞行。这包括保持水平飞行(平飞)、爬升和下降等
减小飞行员的工作负担:通过正确地进行配平,可以减轻飞行员在控制飞机时的工作负担。如果飞机没有正确配平,飞行员将需要持续施加力量来保持所需的飞行姿态,这将会非常疲劳 -
假设飞机正处于平飞状态,而驾驶员是带着杆的,如果松开杆机头就会往下掉,那么现在就是处于一个未配平的状态,配平就是当驾驶员松开杆,飞机能够保持姿态的稳定,这样就不用驾驶员一直带着杆飞,像这个例子就应该向上配平
-
Su-25T 的配平键位(有操纵杆后可以设置在杆上)
向上配平(配平:机首向上):右 Ctrl + .
向下配平(配平:机首向下):右 Ctrl + ;
向左配平(配平:向左滚转):右 Ctrl + ,
向右配平(配平:向右滚转):右 Ctrl + /
-
飞行与导航
-
飞行
控制飞行速度在指定空速左右,高度维持在指定高度左右
注意配平,注意消除侧滑 -
侧滑【什么是侧滑】
侧滑指的是机头朝向和飞行航迹的不一致的现象
造成侧滑的方式有两种,分别是机头朝向改变与飞行航迹改变,侧滑也分两种,分别是左侧滑与右侧滑,不管是哪种原因造成的侧滑,相对气流偏在机头的哪边就叫哪边侧滑
一、当乱流造成机头左偏航时,由于没有坡度,飞机不会转弯,仍然保持着原来的飞行航迹,这时的相对气流变为从机头的右边吹来,即右侧滑,同理,如果乱流让机头朝右,就造成了左侧滑
即左偏航造成右侧滑,右偏航造成左侧滑
二、当乱流造成机身左滚转时,由于带有左坡度,飞机会开始左转弯,也就是说飞行轨迹将左偏,而机头方向保持不变。这时的相对气流变为从机头的左边吹来,这样的侧滑就叫左侧滑,同理,如果乱流让机身右滚转,就造成右侧滑
即左坡度造成左侧滑,右坡度造成右侧滑
侧滑通过看 ADI 底部的侧滑仪可以显示,一般用蹬舵来消除侧滑
例如,飞机由于带右坡度发生右侧滑时,向右蹬舵来消除这个右侧滑,而如果右舵的量过大,则可能会变成左侧滑
-
导航模式
Su-25T 的 HUD 提供在航导航数据,有三个导航子模式:МРШ(即 ENR,在航)、ВЗВ(即 RTN,返回基地)、ПОС(即 LNDG,着陆)。这些子模式在指配飞行路径的适当航点自动选择,也可以通过按下[1]手动循环 -
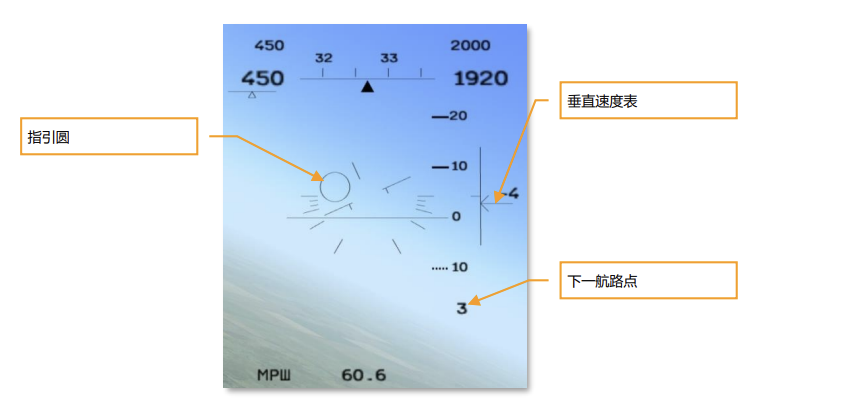
МРШ(ENR 在航)子模式会有一个指引圆显示在 HUD 上。它指示到下一指配航路点的方向
在航到下一指配航路点的指配高度和空速显示在 HUD 当前高度和空速的上方
下一航路点号码显示在右下角,在俯仰标尺下方。到下一航路点的距离显示在 HUD 的底部。到达指配航路点时,指引圆自动显示下一个的方向,右下的航路点号码会增加 -
在 ВЗВ(RTN 返航)子模式里,导引环引导驾驶员截获跑道进近下滑信标
着陆机场可以通过按 [左 Ctrl-~] 循环,机场 ID 号码显示在右下方,垂直速度表下方,所有机场 ID 的完整列表在 Su-25T 手册的附录章节中。航空器接近跑道时机场管制塔台提供语音指示
-
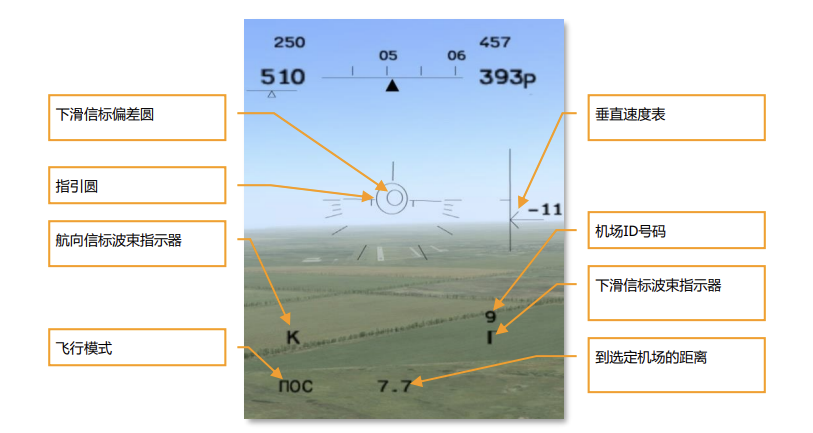
在 ПОС(LNDG 着陆)子模式里,HUD 上出现一个下滑信标偏差圆。当指引和下滑信标圆都在航空器基准的中央时,航空器在正确的进近下滑信标上
(导引环引导驾驶员截获期望的下滑信标。当指引和下滑信标圆都在航空器基准的中央时,航空器在正确的进近下滑信标上)
“К” 和 “Г” 分别表示航向信标和和下滑信标的存在 -
HSI 与 ADI 详解 【参考】
-
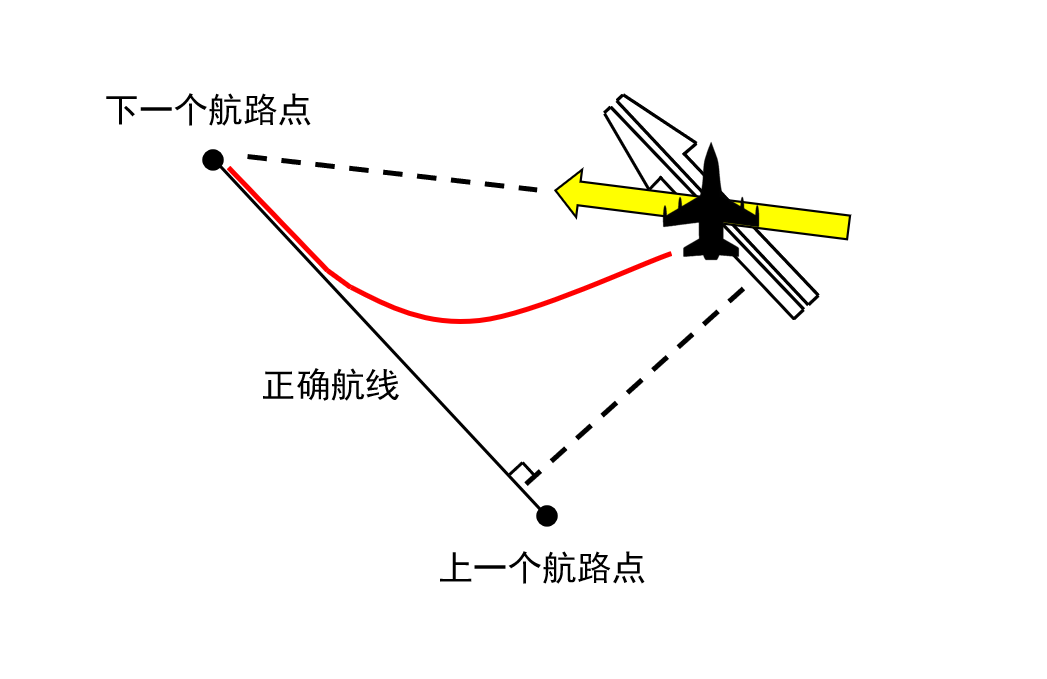
HSI 里面有三个箭头,一个总位于正上方的箭头代表了飞机当前的航向,一个白色双线箭头,即期望航线指针,它与正确的航线是平行关系(在地平线上的投影平行),一个黄色箭头,即航向指针,它指示下一个航路点的航向

- 将投影图画出来如下图所示
-
ADI 中,竖着的黄线(需用坡度)是飞往航线所需打的杆量,若黄线向左歪则向左压杆(正压杆),反之,向右歪则向右压杆(反压杆),若该线垂直且处于表中央,就表明现在正在飞往航线或正在航线上,而横着的黄线(需用俯仰角)即为需要推和拉的杆量,使得该线水平处于表中央
-
假设飞机未处于航线上,ADI 显示出飞向航线所需要打的杆量,照这个杆量打,HSI 上的白色双线箭头(即期望航线指针)会逐渐水平,这是因为飞机在垂直飞向航线,注意,在快要接近航线的时候(期望航线指针还未完全水平,期望航线指针与航向指针还未完全重合)就开始朝航路点的方向转弯,不要等到双线箭头完全水平再转弯(来不及,会穿过航线)
- 失速与尾旋【飞机失速尾旋及其预防控制措施研究】
- 失速
失速是当机翼攻角(迎角)增大到一定的程度(临界迎角)后,机翼上表面气流分离,导致使升力急剧下降,飞行阻力急剧增大,引起抖动与变态的一种不正常飞行状态
如果航空器是在水平飞行中损失空速的话,航空器只会发生失速而不是尾旋。航空器开始“降落伞”式下降并伴随偏航和滚转震荡。如果航空器在失速时还在拉杆的话会加剧滚转震荡导致航空器倒扣,航空器剧烈的朝一侧滚转。如果要从该状态下改出失速的话,向前推杆【失速改出:向前推杆】 - 尾旋
当一侧机翼先于另一侧机翼失速时,飞机会朝先失速的一侧机翼方向沿飞机的纵轴旋转,称为螺旋或尾旋
当航空器处于正常飞行构型或者机动构型状态的话,航空器只能被有意导向尾旋状态。在上述两种状态下,如果杆子置中的话,航空器的尾旋会有所减轻。为了尽快从尾旋中改出,标准的做法是杆子前推,并且朝尾旋反向踩舵【尾旋改出:向前推杆,反向蹬舵,副翼中立】
当航空器处于起飞/着陆构型时,航空器可能由于迎角拉过临界点而无意识地导致尾旋,尤其是对那些重心在航空器尾部的航空器来说。对于 Su-25T 来说,如果航空器的机炮弹药耗尽的话,航空器的重心会偏向尾部,而且重心只会偏向尾部,一旦航空器在这种构型下尾旋的话,实际上是不可能改出的
- 着陆
-
简单着陆
当 HUD 的导航模式为返航模式 RTN 与降落模式 LNDG 时,其右下方的序号不是航路点的序号,而是机场的 ID 号码,在处于 RTN 模式时,飞机导航的点并不是机场的中心,
降落模式才是,RTN 模式导航的点叫做下滑道截获点(GPIP, Glide-Path Intercept Point) -
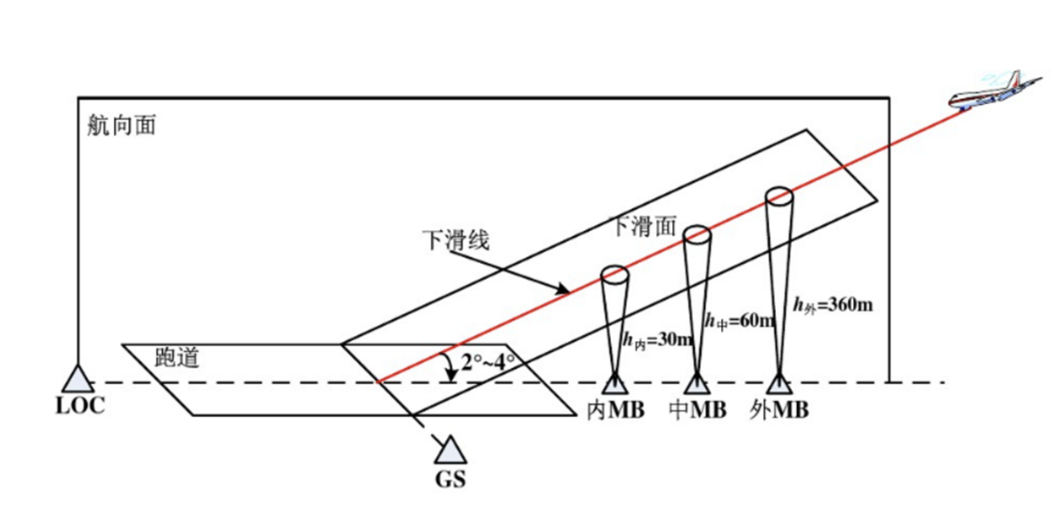
什么是下滑道?
下滑道是指飞机在进近着陆的时候飞机相对地面的航迹,是一种虚拟的斜线,用于引导飞行器沿特定垂直(垂直面的)路径进行降落,而下滑道的角度通常称为下滑路径的角度,在标准的 ILS 系统(仪表着陆系统,Instrument Landing System)中,下滑路径的角度通常为 3 度。当飞行器在这个角度上下降时,它就处于正确的下滑路径上,有助于实现平稳而安全的着陆 -
什么是 ILS 系统?
仪表着陆系统(Instrument Landing System, ILS) 又译为仪器降落系统,盲降系统,是应用最为广泛的飞机精密进近和着陆引导系统。它的作用是由地面发射的两束无线电信号实现航向道和下滑道指引(下滑台波束在垂直方向上进行引导,航向台波束帮助在水平方向上引导),建立一条由跑道指向空中的虚拟路径,飞机通过机载接收设备,确定自身与该路径的相对位置,使飞机沿正确方向飞向跑道并且平稳下降高度,最终实现安全着陆
-
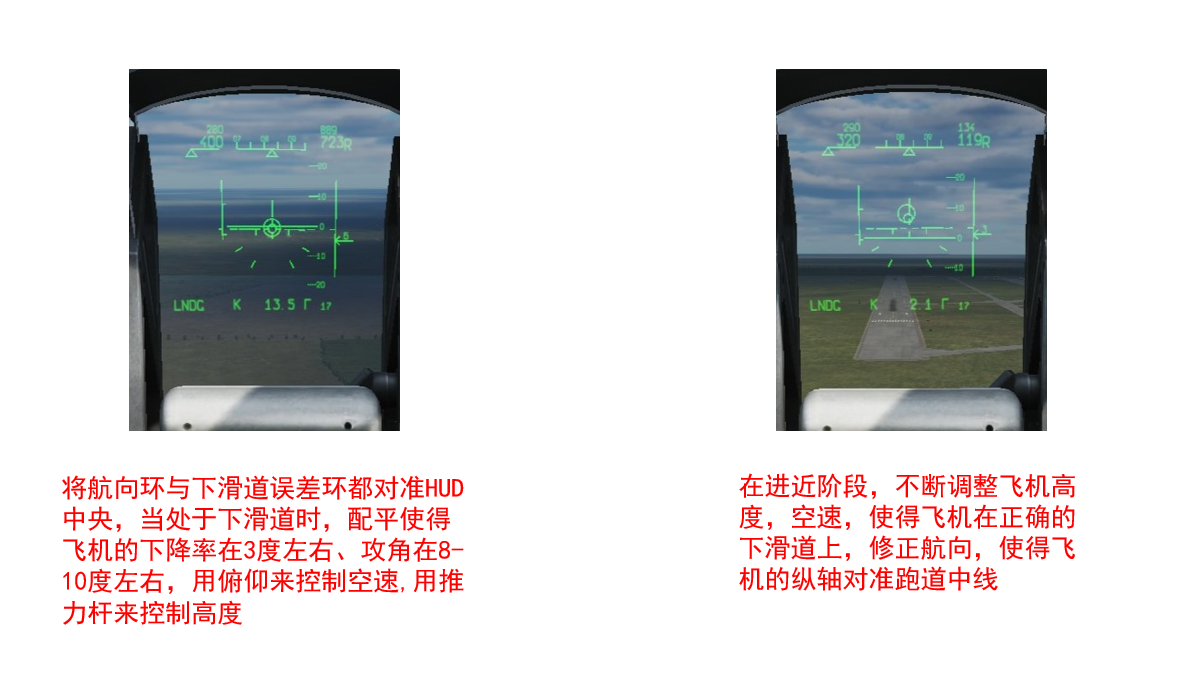
当我们飞过下滑道截获点后,飞机进入降落模式 LNDG(HUD 上的 “К” 即代表飞机已截获 ILS 信号),应立即找准机场的方向,确保航向正确,此时注意 HUD 的左上方的需用速度与右上方的指配高度,指配高度即指示了下滑道的高度,在飞机迫近机场时,指配高度也会随之下降,跟随指配高度即处于下滑道上平稳下降。在对准指引圆与下滑信标偏差圆后,进行配平,使得飞机的下降率稳定在 3 度左右(在 HUD 上的 “Г” 代表飞机正处于下滑道上)
-
注意,下滑信标偏差圆是 ILS 信号的一个偏航指示球,它指示了下滑道与飞机的相对方向,小球(即下滑信标偏差圆)在航空器基准的上方,代表下滑道在飞机的上方,此时大球(指引圆)应在航空器基准的上方指引飞行员将飞机爬升,反之,小球在航空器基准的下方,代表下滑道在飞机的下方,此时大球(指引圆)应在航空器基准的下方指引飞行员将飞机高度降低
-
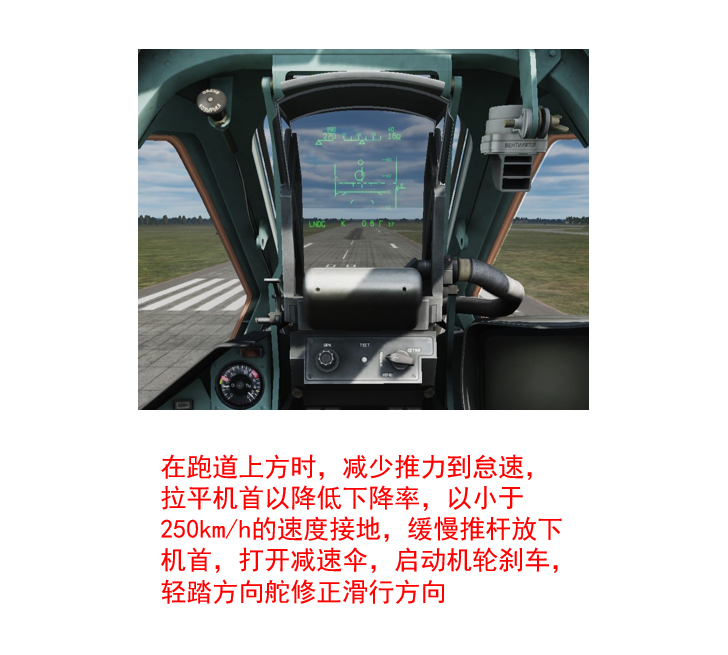
一般在空速低于 400 公里/小时的时候放下起落架(键盘 G 键),打开襟翼(键盘 左 Shift + F)(如果需要,打开减速板,键盘 B 键),在开始下滑道下降时把速度降到约 290-310 公里/小时(近进速度),到达近台后速度降至 260-280 公里/小时,在跑道上方时,把推力降到怠速,随着航空器缓慢下降,保持住向后拉杆增加仰角,轻轻触地,速度在 220-240 公里/小时左右(接地速度),通过小心的推杆、释放减速伞(键盘 P 键)(并打开减速板)和使用刹车来放下机首。通过对方向舵踏板的控制,保持机首指向跑道的中心线,如果制动时航空器改变方向,松开刹车,纠正航空器的航线后,重新启动刹车
- 一点成功的经验
su-25t 的速度降的很慢,需要提前降速,可以减油或者打开减速板,需要注意的是,飞机在垂直面向下(向下俯冲)的时候会加速,所以时刻注意减速;
su-25t 的起落架很脆弱,触地的时候一定要控制好下降率,不要砸在跑道上,另外,它的机轮刹车很难用,在跑道上速度容易降不下,这个首先要控制触地时的速度,参考手册上的 220-240 公里/小时,然后就是打开减速板,打开减速伞,在跑道上滑行的时候,尽量对准跑道中线,但不要猛踩舵,高速滑行的时候猛踩舵,飞机容易侧翻,轻踩脚舵,使得飞机对准跑道中线
-
困难着陆
-
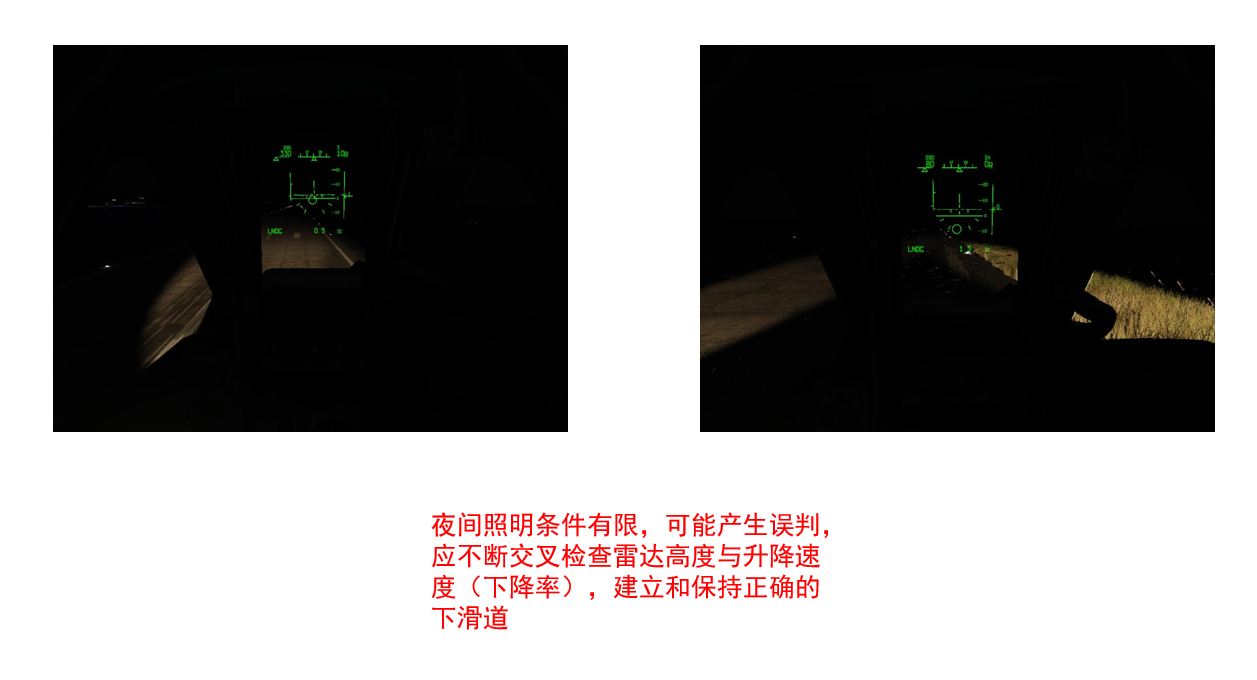
夜间与恶劣天气的着陆
打开座舱灯光,打开机身外部灯光,航行灯与起落架灯光
跟随需用速度与指配高度,跟随指引圆,到达 LNDG 模式后,准备着陆,还是跟随需用速度与指配高度,跟随指引圆,注意飞机的四项数据,攻角、速度、高度与下降率,打好配平,使得飞机保持在一个 8-10 度的攻角上(松开杆的情况),这样飞机的下降率会是一个合适的下降率,打好配平后,使用节流阀即油门来控制飞机的高度,注意,是油门而不是杆,操纵杆只用来调整左右坡度,若飞机低于下滑道高度,此时应推油,反之,若飞机高于下滑道高度,此时应收油,在空速低于 400 公里/小时的时候放下起落架,打开襟翼,走上面的简单着陆的流程
-
一点成功的经验
换一下思路可能成功得更快,即注意如何避免失败
时刻注意飞机的雷达高度,夜间看不见可能产生感觉上的误导,注意雷达高度可以避免摔在地上
既要关注 HUD 上的指引圆,也要根据飞机当前的姿态与机场的跑道灯自行判断
接地速度一定要降下来,300 多公里/小时的速度砸在地上很容易就弹起来,而且会摔断起落架
不要一味地减速,速度降得太低会使飞机往下跌得过快,拉也拉不上来 -
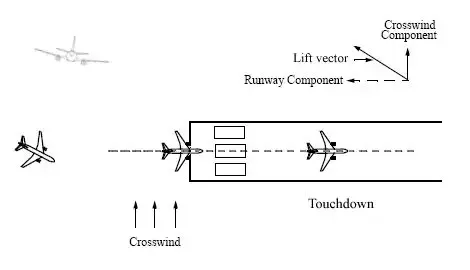
侧风着陆注意点【如何做出完美的侧风着陆】
侧风着陆是指飞机在机场跑道有侧风的情况下着陆,因为侧风会把飞机吹离跑道的中线,因此必须调整飞行的方向加以补偿,一般来说这补偿可以透过两种方法来进行:分别为蟹形进场(Crad Method)及侧滑进场(Side Slip Method or Wing-Low Method) -
蟹形进场
使用蟹形进场时,飞机沿著跑道的中心线下降,并且将机头稍微转向风的方向。飞机在侧风之下与地面相对的飞行方向,与跑道中线保持平行。但同时飞机的纵轴却会与跑道形成一个夹角,称之为蟹形角度(Crab Angle)。从地面看的飞机,好像是蟹一样在打横飞行,故此这种降落方式称为 “蟹形进场”。传统的蟹形进场,飞行员会在飞机著陆前最后一刻用方向舵扭转机头,将飞机的纵轴与跑道对齐
-
蟹形及侧滑进场
由于蟹形进场存在着相当的风险,很多飞行员只会在降落的初段使用蟹形进场。当飞机下降至较低高度后,则改用侧滑进场的方法,直至完成着陆。这种结合的进场方法称为 “蟹形及侧滑进场”(即飞行手册上的做法)。 -
侧滑进场
使用侧滑进场,飞机同时使用副翼及方向舵补偿因为侧风而出现的位置偏差,方向舵是用来把飞机的飞行方向调整至同跑道方向对齐,而副翼则用作将飞机维持在跑道中间线之上。在这种侧滑的飞行状态下,飞机带有一定坡度,向侧风来流方向倾斜,用机翼升力的横向分量来抵消侧风影响(多数的飞行员都喜欢在降落的前段先使用蟹型进场,直至到快接地前才转成为侧滑)
- 举一个侧风着陆的例子【侧风进近】
如果在最后进近的时候有左侧风,飞机机头将迎风摆动(即向左摆动),应蹬右舵使得机头对准跑道中心线,同时向左压杆,使飞机带左坡度而产生左侧滑,以抵消侧风影响,避免偏离航线,通常当飞机在最后降落时,侧风风速随高度减小,应慢慢减少控制的力道,确保飞机在正确的航道(下滑道)上飞行,其纵轴与跑道对齐,而在改平过程中,侧风修正需要增加控制力道,因为在着陆过程中,随着空速降低,控制会变得不是那么有效。总之就是要确保飞机对齐跑道的中线
在侧风落地时,不能让机翼保持平衡,也就是说先让(主起落架的)一个轮子触地,当飞机的空速与动量减小时,下风处的那个轮子也会随之落下,当主起落架接地后,松开方向舵,快速地将机首起落架置中,小心地平放机鼻,使得机首起落架接地,一但航空器在跑道的中心线上稳定下来,启动机轮刹车
在有侧风的情况下使用减速伞后应迅速断开,当侧风高于于 4-5 米/秒的时候,不能使用减速伞
- 自动驾驶
ACS-8 自动控制系统(ACS 或“自动驾驶”)面板位于仪表面板的左侧。以六盏亮灯按钮指示 ACS 的操作模式,可用的 ACS 操作模式包括有:航线跟随并着陆、战斗转弯、高度保持模式(保持当前的俯仰和倾侧角度)、气压高度保持、气压高度和倾侧角保持、应急改平模式、可以自动地形回避的雷达高度保持、瞬时超控(编程)模式
除了“应急改平”、“航线跟随”以及“着陆”模式外,其他模式的自动驾驶把倾侧角限制在 ±60 度内,俯仰角限制在 ±35 度内。当到达任何一个限制时,自动驾驶会断开,航空器返回人手控制。超过这些限制,自动驾驶不能接通。ACS 还根据航空器的仪表,把迎角(AOA)限制在 15 度以内,把过载限制在 0 - 3G。迎角超过 12 度时,不建议接通自动驾驶。如果在自动驾驶接通时迎角超出 12 度,飞行员应立即把发动机节流阀前推,增加空速和推力

-
航线跟随模式,航空器的航电在“途中”或者“返航”导航操作模式时,按 А 或者左 Alt + 6 选择此模式,自动驾驶会跟随指定的航线飞行
-
着陆模式,航空器的航电在“着陆”导航操作模式时,按 А 或左 Alt + 6 接通此模式,接近跑道时,会从“途中”和“返航”导航操作模式自动切换到着陆模式。“着陆”自动驾驶模式把航空器保持在着陆机场的下滑道信标上。在下降到离地高度(AGL)50 米之后,ACS 自动关闭。无论航空器以任何理由偏离下滑道,ACS 模式会自动从“着陆”模式切换到“水平姿态”模式。“着陆” ACS 模式在离地 100-200 米时一般由飞行员手动关闭。建议只在能见度比较差的情况下使用自动驾驶下降到 50 米最小离地高度
-
战斗转弯模式,当一个目标或地形点被机载“Shkval”瞄准系统锁定时,按 А 或左 Alt + 6 选择该模式。自动驾驶会滚转航空器朝向目标方位。用俯仰角来保持高度。按住左 Alt + ~ 接通“瞬时超控”模式,只允许飞行员控制航空器的俯仰角 - 自动驾驶仍然控制倾侧角。松开按键断开“超控”模式后,自动驾驶控制航空器返回初始高度
-
姿态保持模式,按左 Alt + 1 选择该模式,航空器会稳定保持当前的俯仰角和倾侧角
-
气压高度与倾侧角保持模式,按左 Alt + 2 选择该模式,航空器会稳定保持当前的气压高度(海拔高度 ASL)和倾侧角。用此模式可方便的进行持续水平转弯
-
应急改平模式,按左 Alt + 3 选择该模式,把航空器在任何初始姿态中强制平飞。如果初始倾侧角超过 ±80 度,自动驾驶首先调整滚转,然后调整俯仰。当倾侧角在 ±7 度之内,而且俯仰角在 ±5 度之内,“气压高度保持”ACS 模式激活,并且把倾侧角改为 0 度
-
气压高度保持模式,按 H 或左 Alt + 4 选择该模式,航空器稳定保持在当前的气压高度(海拔高度 ASL)
-
雷达高度保持模式,按左 Alt + 5 选择该模式,航空器稳定保持在当前的雷达高度(离地高度 AGL)。在这个 ACS 模式中,“地形回避”子模式也同时激活
-
断开所有的自动驾驶模式:按左 Alt + 9
¶武器系统使用简记
Su-25T 是俄罗斯空军优异的战术攻击机。它可以在全天候条件以及各种气象条件下精确打击小型和移动目标
Su-25T 配备有 I-251 “Shkval”电视瞄准系统,以及“Prichal”激光测距瞄准指示器。对于夜间行动,Su-25T 也可装备“Mercury”微光电视(LLTV)瞄准系统。
出于自保,Su-25T 可以携带 R-73 和 R-60 近距空空导弹。
重新回到钟表店,我们需要认识更多的钟表
- 首先是武器状态面板与武器系统控制面板
它们分别处于下图中的正下方偏右与左下方的位置
- 武器状态面板
武器状态面板指示当前所选武器的型号、数量、就绪状态以及机炮剩余弹药
这是一块黑色的面板,它的顶部是一个机翼的形状,机翼下面有两排指示灯,黄灯显示了武器挂架上的武器,绿灯显示了当前选择的武器


- 上面的一排黄灯指示武器的可用状态以及挂架位置。当武器已发射或投放后,相应的黄灯会熄灭
- 下方的一排绿灯表示当前所选的武器已经就绪,可以发射或投放
- 当前所选武器的类型显示在面板的右上角
- 机炮剩余弹药量显示在面板右下角窗口中

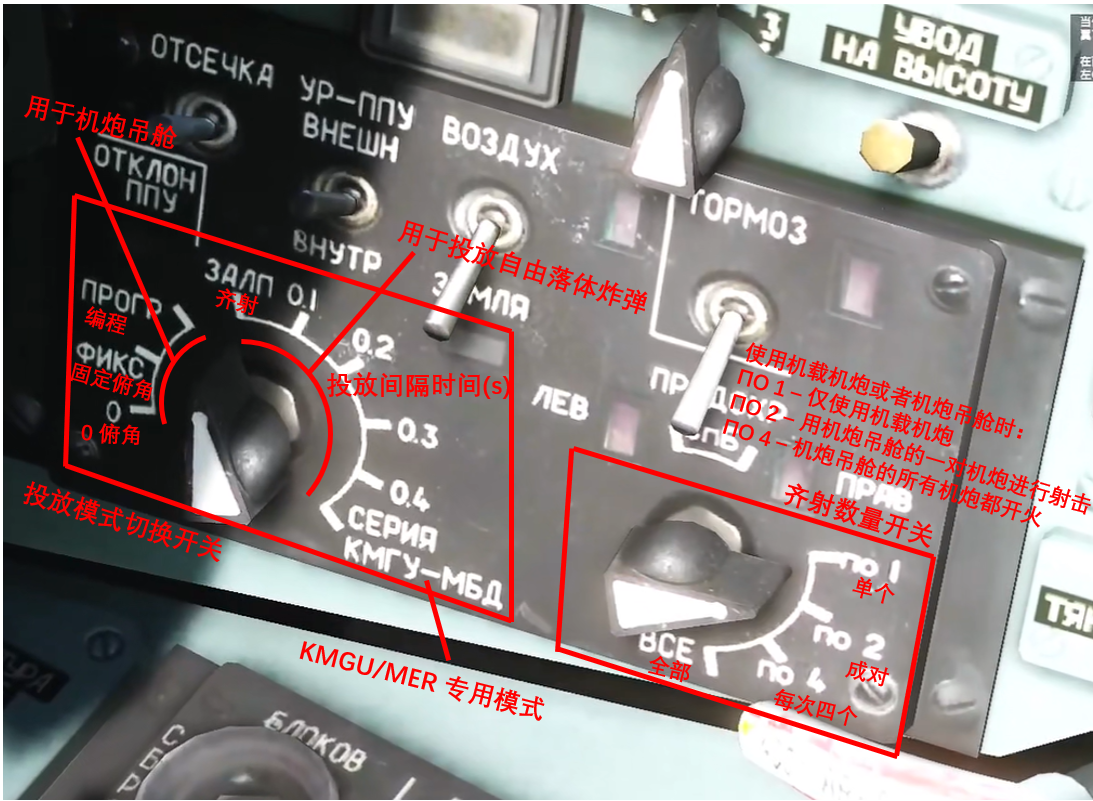
- 武器系统控制面板
武器系统控制面板用来控制武器齐射数量以及投放间隔


- 主要看这两个旋钮选择开关
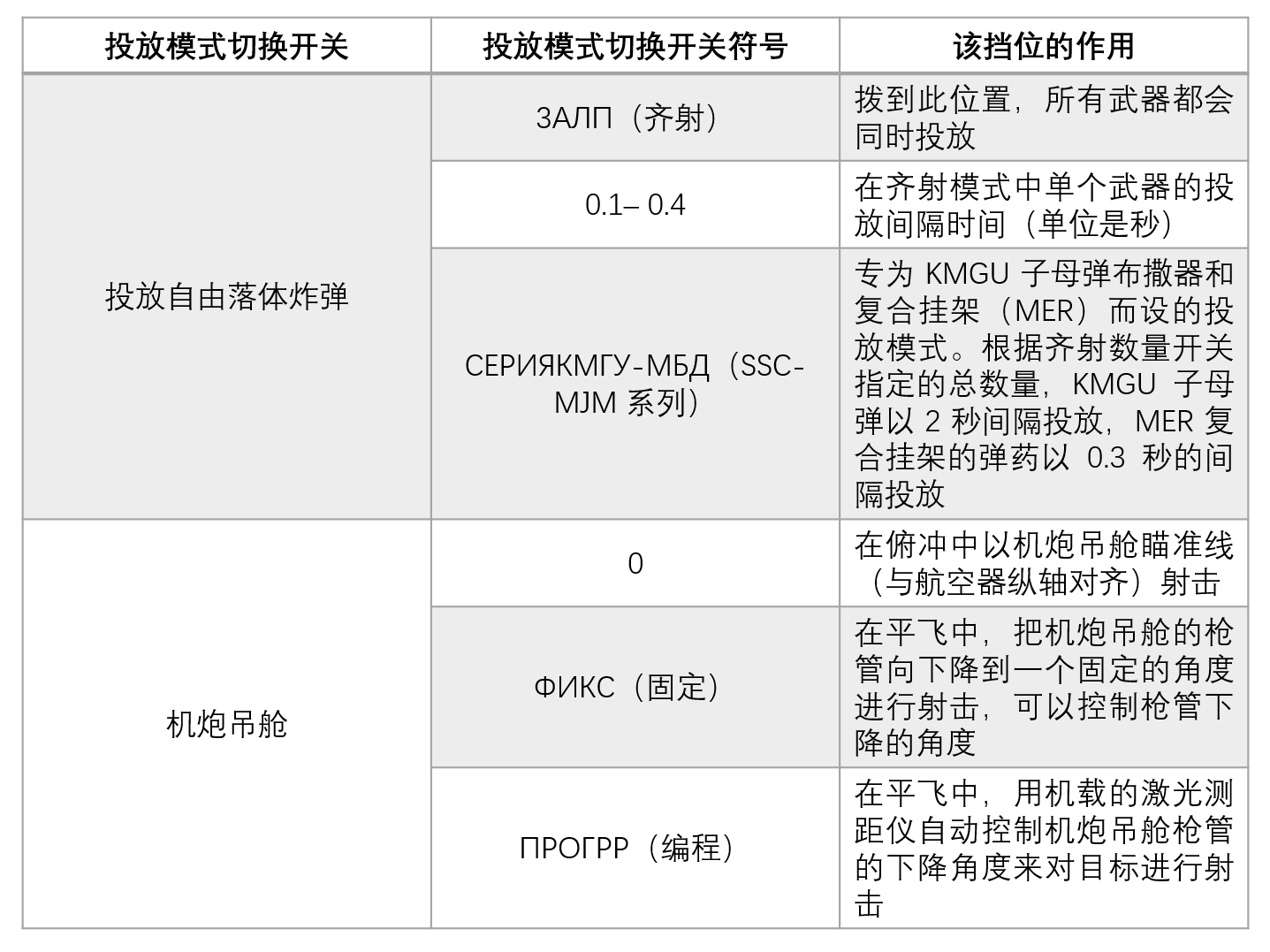
- 投放模式切换开关(间隔设置开关)
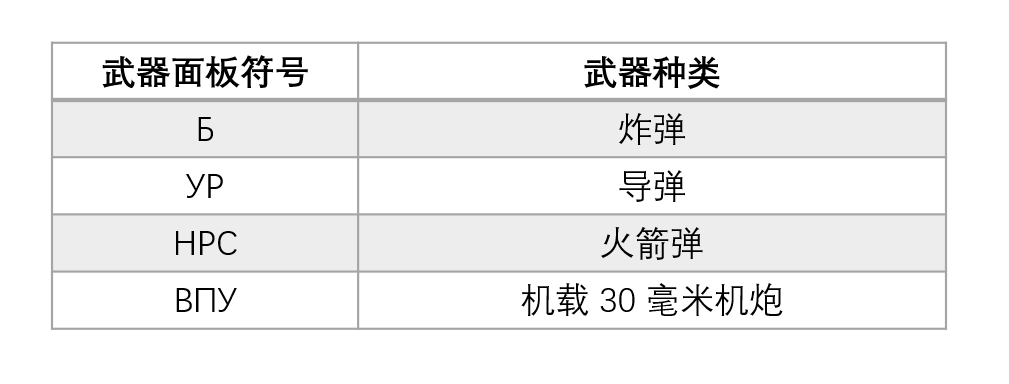
投放模式切换开关有六个位置用于投放自由落体炸弹,分别是 ЗАЛП - 0.1 - 0.2 - 0.3 - 0.4 - СЕРИЯКМГУ-МБД,用于机炮吊舱则有三个位置分别是:0 - ФИКС - ПРОГР,这些符号与其作用的对应关系如下表所示
- 齐射数量开关

- 武器控制面板标注图
-
CCIP 与 CCRP 的简单介绍
当涉及到军用武器投放方式时,CCIP(Continuously Computed Impact Point,持续计算命中点)和 CCRP(Continuously Computed Release Point,持续计算释放点)是两种常见的术语: -
CCIP:
CCIP 是一种用于空对地武器投放的方法,其中飞行器的计算机在实时计算武器命中点。在 CCIP 模式下,飞行员指定目标,飞行器的传感器、导航和武器系统协同工作,不断根据当前飞行参数计算命中点。飞行员因此可以在接近目标的任何时刻释放武器
CCIP 提供了根据目标位置或威胁环境的变化调整释放点的灵活性 -
CCRP:
CCRP 是另一种空对地武器投放方法,强调连续计算释放点而非命中点。在 CCRP 模式下,飞行员指定目标,飞行器的系统基于飞行器当前位置、速度、高度和目标位置等因素计算理想释放点。然后飞行员在预先计算的释放点释放武器
CCRP提供了更自动化和精确的武器释放。通常用于在远距离释放武器,使飞行器在武器命中目标之前就能迅速远离 -
总的来说,CCIP 和 CCRP 都是军用飞行器用于精确投放空对地武器的方法。CCIP 允许飞行员持续计算命中点,提供在接近目标时选择释放点的灵活性;而 CCRP 则通过基于各种参数事先计算释放点,实现更自动化和精确的武器投放。选择 CCIP 还是 CCRP 取决于任务需求以及飞行器和武器系统的能力
- 自由落体炸弹
Su-25T 的 无制导炸弹包括 FAB-500、FAB-250、FAB-100、BetAB-500 和 ODAB-500、RBK 集束炸弹和 KMGU 散布器、ZAB-500 燃烧弹等(名字中的数字代表弹头的公斤数)
要使用自由落体武器攻击地面目标,驾驶员激活“ОПТ-ЗЕМЛЯ”(对地) 模式(按 7 键)并按 D 键选择需要的自由落体炸弹、集束炸弹或容器,按 Ctrl + Space 使用齐射数量开关设置投放数量(ПО 1 - ПО 2 – ПО 4 – ВСЕ),按 V 键使用投放模式切换开关设置炸弹投放间隔时间(ЗАЛП - 0.1 - 0.2 - 0.3 - 0.4 - СЕРИЯКМГУ-МБД)
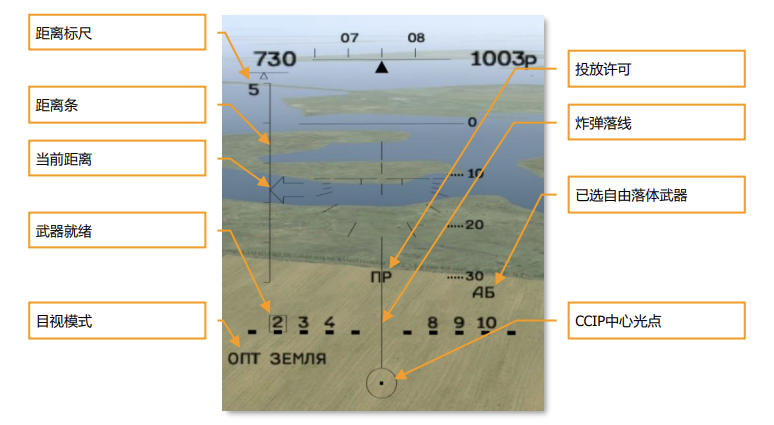
- CCIP 模式普通投弹
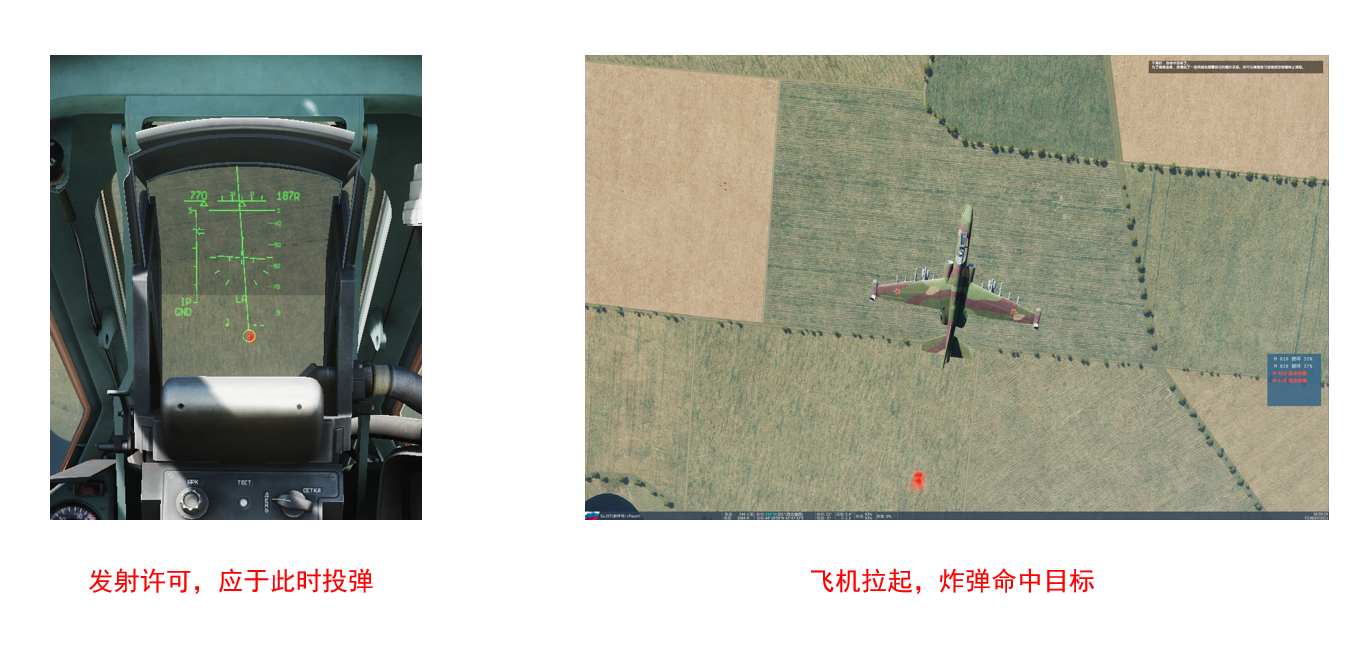
HUD 底部的连续计算命中点(CCIP)中心光点指示下个炸弹的命中点,驾驶员机动航空器(向目标俯冲)让连续计算命中点(CCIP)中心光点与目标重合,当一条直线出现在瞄准准星顶部,并且 HUD 底部出现 LA(ПP) 标志即 “发射许可” 信号时,按 Space 键或扣下操纵杆的扳机进行投放,注意俯冲时用油门与减速板控制飞机的空速不要过快,投弹后及时缓慢地拉起
高阻弹药和一些集束子弹药会沿着高度弯曲的弹道飞行,使其在任何角度俯冲时,命中点低于 HUD 可视范围的下边缘。那样 CCIP 中心光点不能用目视放到目标上。这种情况下,使用连续计算投放点(CCRP)模式,也就是 “不可目视区域” 轰炸模式来代替 CCIP 模式
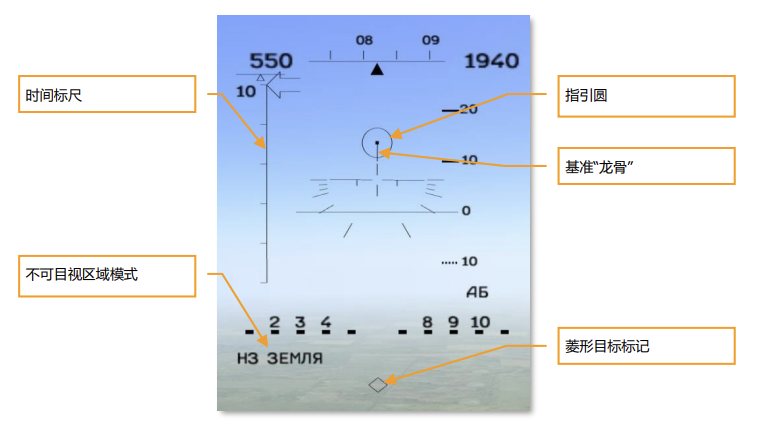
- CCRP 模式普通投弹
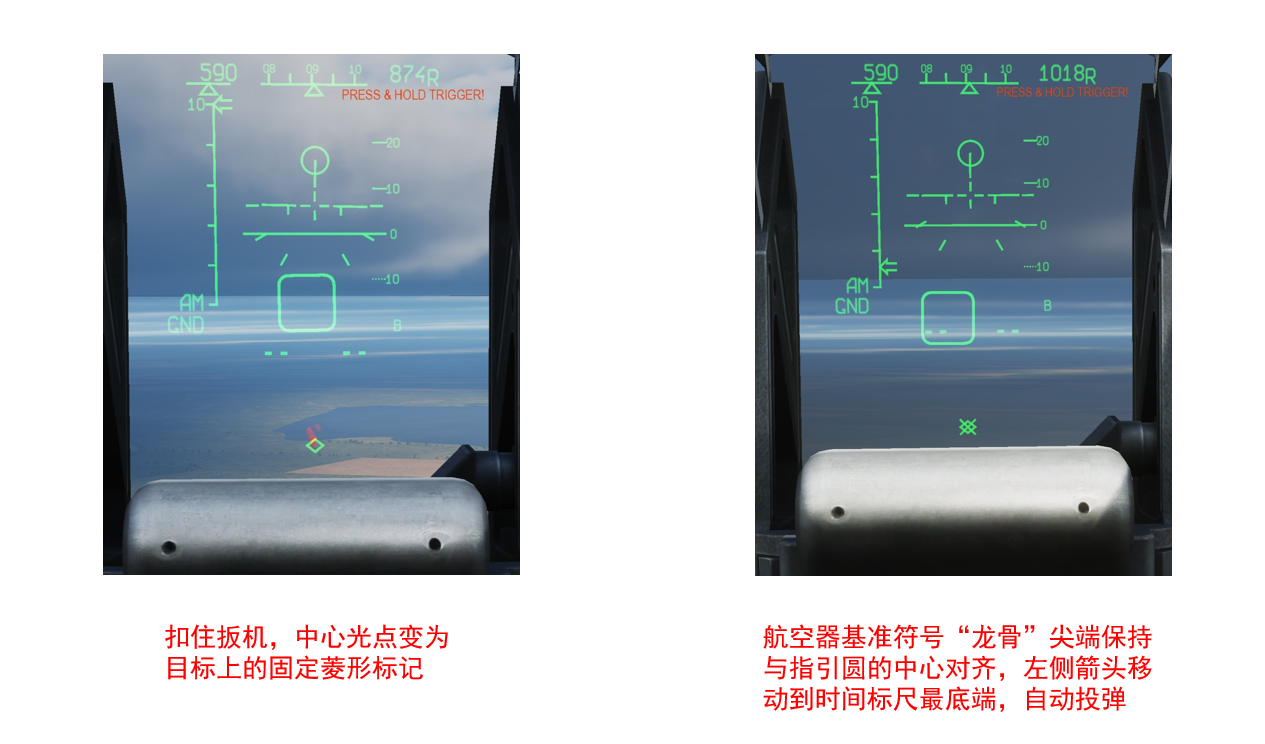
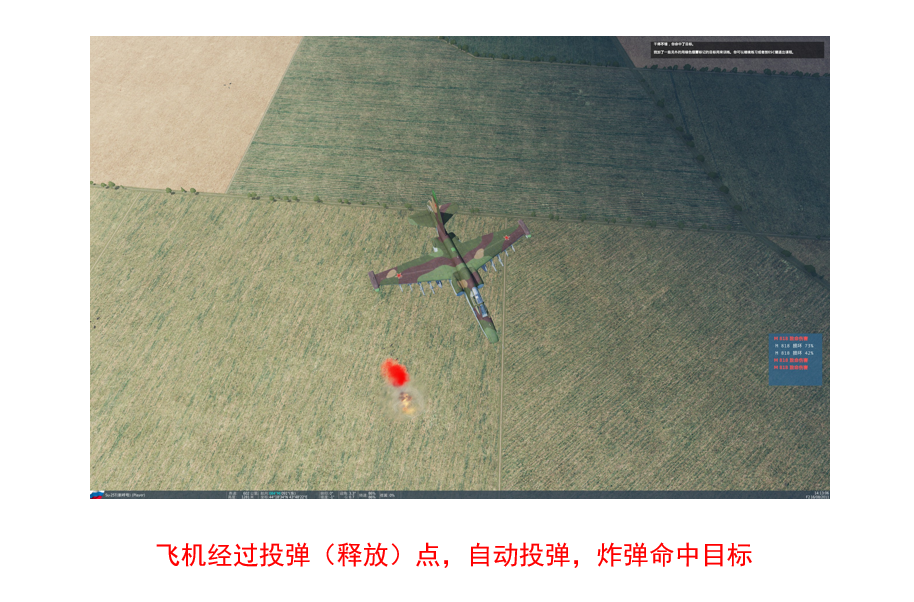
CCRP 中心光点在 HUD 的最底端,驾驶员机动航空器把中心光点放在目标上,扣下扳机并保持扣住,中心光点将变成在目标上的固定菱形标记,一个指引圆出现在 HUD 的上半部分,HUD 上航空器基准符号竖线上面的尖端应保持与指引圆的中心对齐,HUD 左侧为时间标尺,指示到炸弹自动投放的剩余秒数,箭头在投弹 10 秒内开始移动,当其移动到时间标尺的最底端,炸弹自动投出,此时可以松开扳机
- KMGU 子母弹布撒器
除了无制导炸弹,Su-25T 还可以使用 KMGU 子母弹布撒器
集束弹药(英文:Cluster Munitions,俗称:子母弹),是将几十枚甚至几百枚小炸弹组合成的大型弹药,是一种以毁伤面目标为主的常规弹药。集束弹药具有瞬时火力密集、覆盖面积、毁伤效能大等特点,主要用于攻击坦克、装甲战车、部队集结地等集群目标,或封锁机场跑道等大面积目标
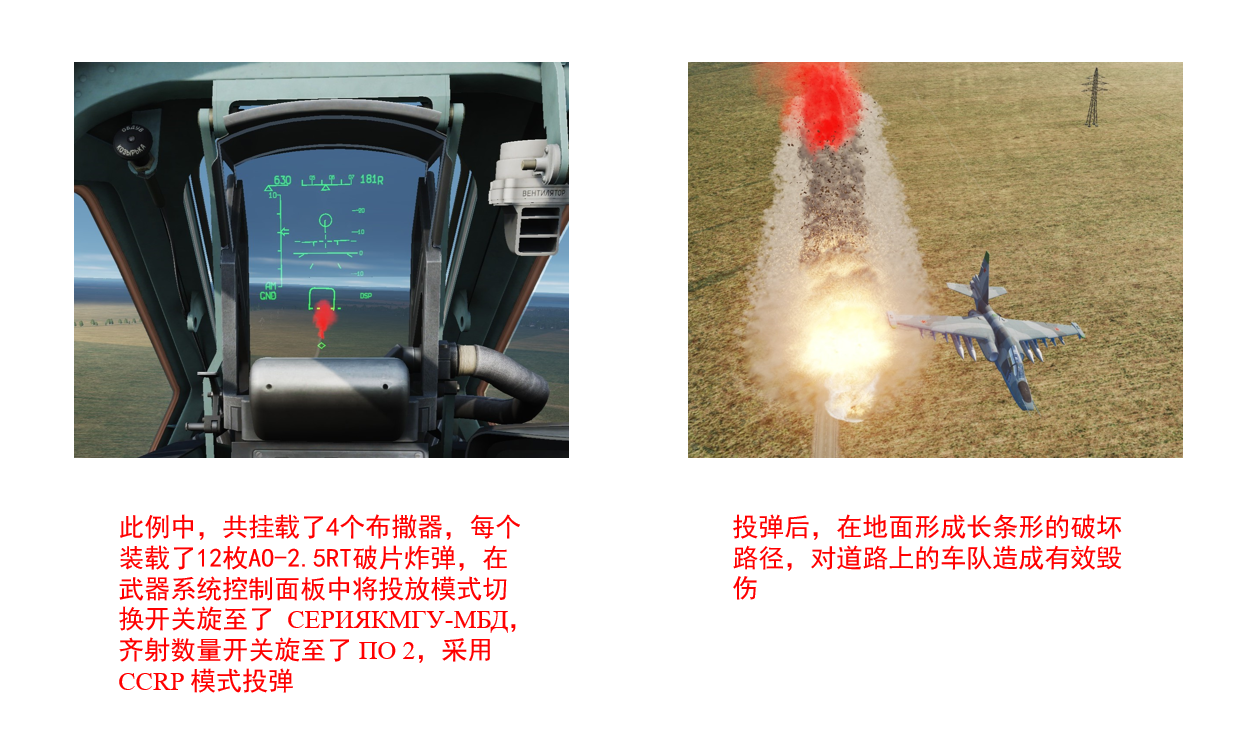
在武器控制面板上用间隔设置开关(按 V 键)选择 СЕРИЯКМГУ-МБД,这是一种针对 KMGU 子母弹布撒器和多联挂架(MER)的特殊模式,选择好后,KMGU 子母弹以 2 秒间隔投放,MER 复合挂架的弹药以 0.3 秒的间隔投放,在接近目标时,切换空对地模式(按 7 键),选择 CCIP 或 CCRP 模式进行投弹,投弹后可以(按 LCtrl + W)将空的布撒器抛离,并根据重量变化对飞机进行配平
- 航空火箭弹
航空火箭弹通常用于描述任何无制导火箭弹和没有传感器发射后不可控制的导弹,进入空对地模式后(按 7 键),当武器栏显示的是 HPC 时代表当前选择的武器是火箭弹,可以随时切换火箭弹类型(按 D 键)
火箭弹的类型显示在 HUD 的右下角,包括有挂载在 U32A 火箭巢(UB-32 发射器)中的 S5 火箭弹,S5 火箭弹是一种很小的装备了高爆战斗部的火箭弹;有 S-8 KOM 火箭弹,其使用的 B-8M1 火箭巢(B-8 发射器)可以装载 20 枚火箭弹,S-8 火箭弹的直径达 82 mm,射程约 2 km,装备了爆炸成型战斗部,适用于对抗装甲;有 S-13 OF 火箭弹,每四枚一起装载在 B-13L 火箭巢(UB-13 发射器)里,它比 S-5 和 S-8 都要大,直径为 122 mm,其装备了破片战斗部,射程约 2 km,高爆战斗部用于对抗无装甲和轻装甲目标,如果直接命中装甲目标的话也能将之摧毁;有 S-24B 火箭弹,其直径达 240 mm,总重量达 235 kg,配备了破片战斗部,由于其尺寸限制,不能装载在火箭巢里,只能直接挂载在武器挂点上;另一种大型火箭弹是 S-25 OFM,直径 340 mm,战斗部 190kg,这型火箭弹的射程最远,达到了 3 km,每枚火箭弹挂载在单发射挂架上;还有一种火箭弹是 S-8 OFP2,和 KOM 版本一样,直径是 82 mm,每个火箭巢装载 20 枚,但这型火箭弹装备了破片战斗部

- 航空火箭弹的投放
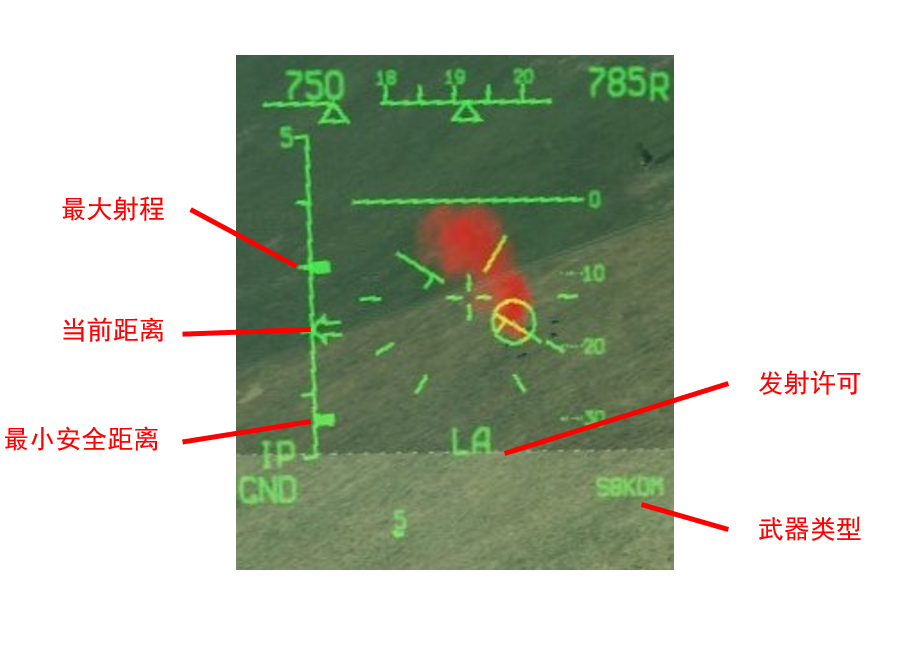
航空火箭弹的投放采用的是 CCIP 模式,火箭弹的瞄准标尺位于 HUD 中央,和炸弹瞄准标尺相似,显示了此刻发射火箭弹时火箭弹的命中点,每种火箭弹有对应的最大最小射程,火箭弹发射包线显示在 HUD 左侧,顶部的横条显示火箭弹最大射程,底部的横条显示火箭弹最小安全距离,沿 HUD 左侧垂直移动的符号显示了根据火箭弹瞄准标尺获得的当前距离,符号处于最大距离与最小距离之间时即可发射,如果选择的火箭弹在射程内,HUD 上会显示准许发射(LA)提示
-
内置机炮
Su-25T 在机身前部装了一门双管 Gsh20 30 mm 机炮,备弹 200 发,炮弹是穿甲高爆弹,适用于对抗轻装甲和无装甲目标,炮弹混合装载了曳光弹,用于判断着弹点,机炮射速每分钟 3000 发,出膛速度每秒钟 870 m
机炮通过激活空对地模式(按 7 键)和机炮(按 C 键)来选择,指示子弹命中点的扫射中心光点出现在航空器基准的下面,剩余的储弹量显示在俯仰标尺的下面。满库弹药显示为 “4”,最后剩余的 1/4 弹药显示为 “1” -
机炮吊舱
除了内置的 30 mm 机炮,Su-25T 还能携带最多 4 个 SPPU-22-1 外挂机炮吊舱,每个吊舱包含 2 门 Gsh-23L 自动机炮,备弹 260 发 23 mm 炮弹,射速每分钟 3000 发,有效射程 2 km,适用于对抗轻装甲和无装甲目标
使用武器控制面板设置机炮吊舱的模式与数量

- Shkval 传感器和 Kh-29T 和 KAB-500Kr
Su-25T 搭载有 I-251 “Shkval” 光电传感器
激活机头的 Shkval 传感器后,传感器生成的图像显示在前面板右侧的 IT-23M 电视屏幕上(按 O 键打开 Shkval 传感器),在屏幕的上方以及左侧各有一个比例尺以及参考符,用来指示传感器相对于中心线移动的位置,即传感器孔径轴线的位置,上方的比例尺是方位角移动指示,以中心线为中心,左右各延伸 40 度,左侧的垂直比例尺是仰角标度,范围在 +20 度到 -90 度之间;比例尺上最长的那条线就是代表默认的传感器孔径轴线(使用 ; . , / 这四个键来移动传感器视线,使用 右 CTRL + I 键来将传感器视线返回孔径轴线),在垂直比例尺的右方是俯仰角指示框,屏幕的右上角显示当前的高度,其中有 R 代表雷达高度而非气压高度;屏幕中间的四个直角符号指示了传感器的放大倍数,当这些直角符显示时,表示 Shkval 正使用 8 倍放大,可更改为 23 倍放大(按 = 键改成 23 倍,按 - 键返回 8 倍),直角符会消失;屏幕中心的直线代表地平线,虚线表示俯仰角,实线代表滚转角
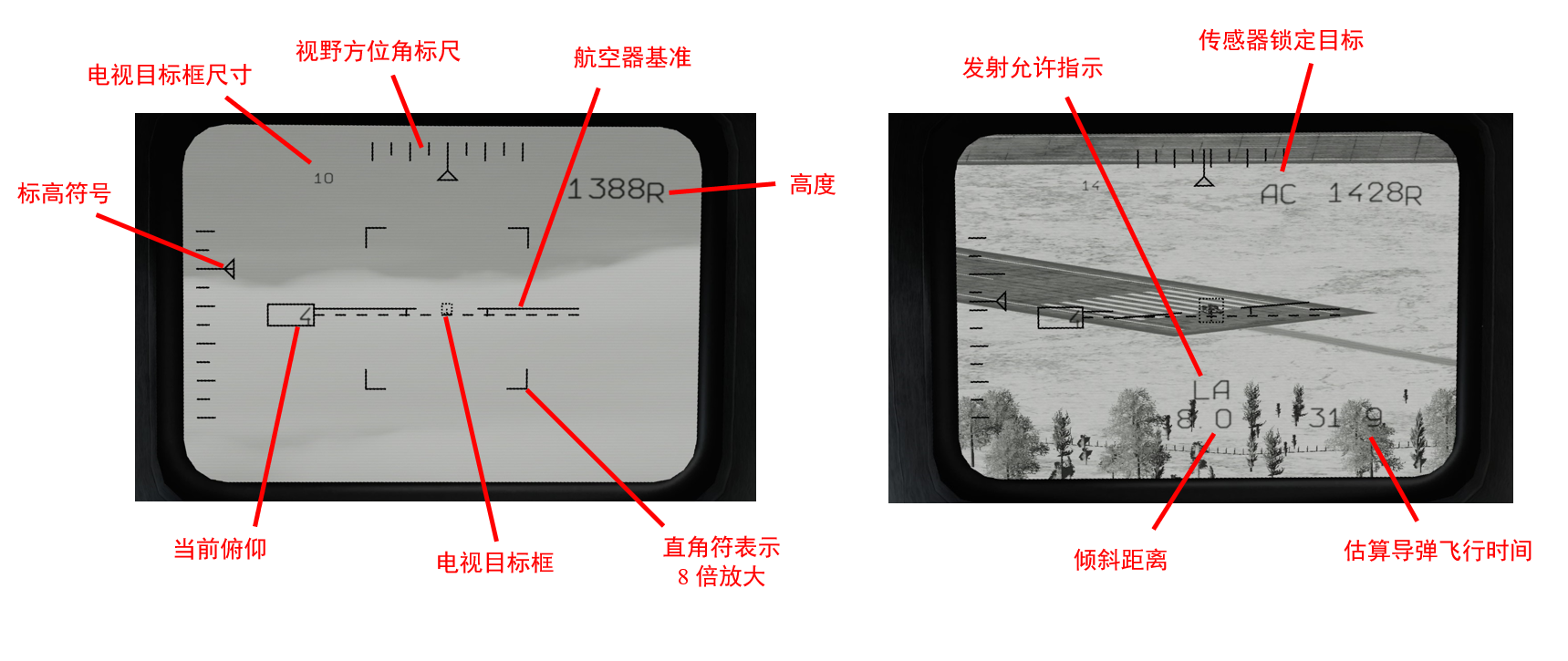
- 使用 Shkval 传感器进行精确打击
在 HUD 上会看到字母 TV (俄文 TB)显示在左侧,表示 Shkval 已激活,左下角有 GUD(ЗМЛ),右下角为武器型号,中间是准心,与 Shkval 视线位置相对应,方便把传感器对准目标,当 Shkval 的视线移动到目标上时,可以将传感器锁定在该目标上(按 ENTER);锁定完成后,会有字母 KC 显示在电视屏幕上高度读数的左边,代表传感器已经稳定在地面上,并且可以移动,在电视屏幕的右下角,是所选武器到达指示地点的飞行所需时间读数(秒);电视屏幕的中心有一个虚线小方框,称为目标锁定框,其大小在屏幕左上角显示,可以调整锁定框的大小来更好地匹配目标(右 CTRL + ] 增大,右 CTRL + [ 减小),如果打击目标在目标锁定框内,传感器会锁定住目标,字母 KC 将变为 AC(实际操作中,可能出现未能锁定的情况,需要多次调整锁定框,重新对准目标,并向目标再靠近一些)一旦目标进入 Shkval 的激光测距仪范围内,电视屏幕底部中间会显示到目标的斜线距离
在 HUD 上可以看到所选武器的距离提示箭头以及最大最小射程符号,当箭头位于两个射程符号之间时,HUD 与电视屏幕上都会出现发射允许指示(LA / ПP),此时可以投放武器
先在 HUD 上将准心对准目标的大致位置并将传感器稳定,再在电视屏幕上进行操作,在专注于电视屏幕时,可以使用自动驾驶保持平飞

-
Kh-29T 和 KAB-500Kr
Kh-29T 导弹的重量为 685 kg,射程为 12 km,带 317 kg 战斗部,可以摧毁几乎所有类型的装甲车辆以及大部分的碉堡,该导弹为发射后不管
KAB-500Kr 制导炸弹的射程比 Kh-29T 导弹小得多,但它的战斗部重达 380 kg,同样也是发射后不管武器 -
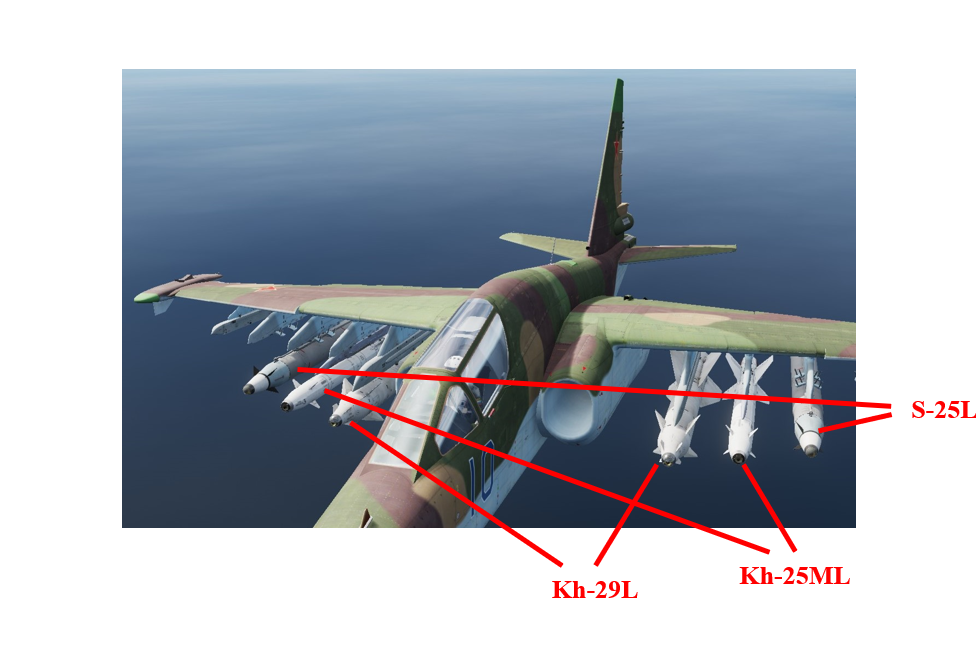
Kh-29L、Kh-25ML 和 S-25L 激光制导导弹
用 Shkval 传感器给激光制导导弹指示目标时,所有的操作原理与之前的导弹一致,只是激光制导导弹在击中之前需要激光一直照射目标
打开激光(右 SHIFT + O),在打开激光后,HUD 左侧与 Shkval 屏幕的中间下方都会显示 LR(ИД),发射导弹后,在导弹飞行过程中,要一直保持 Shkval 锁定目标,激光也要一直打开(若 LA 即发射允许指示在闪烁,此时无法发射,需要飞机俯冲一定的角度使其不再闪烁才能发射),在使用完后记得关闭激光
Kh-25ML 导弹的射程为 8 km,其战斗部具有良好的装甲穿透能力,使用半主动激光制导;Kh-29L 比 Kh-25ML 大得多,在最佳条件下可以打到 30 km 开外(30 km 是弹道射程,实际射程是 8 - 10 km),它具有一个重达 320 kg 的大型高爆穿甲战斗部;最后是 S-25L,实际上它是 S-25 非制导火箭弹的激光制导版,射程大约是 3 km,战斗部重 190 kg,足够摧毁几乎所有类型的坦克
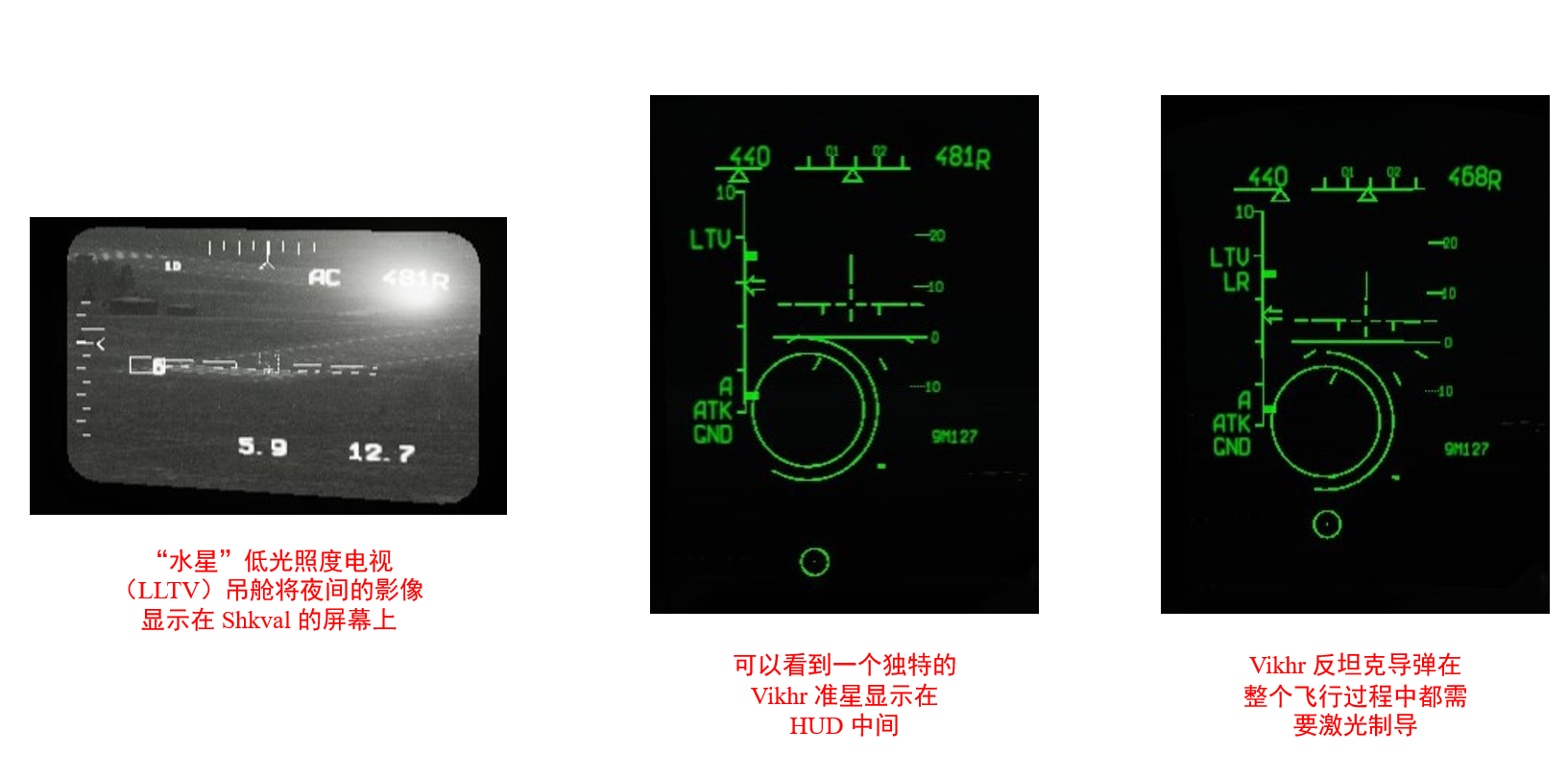
- Vikhr 激光波束制导导弹和 Mercury 吊舱
9A4172 Vikhr 反坦克导弹在整个飞行过程中都需要激光制导,它射程 8 km,可以打击地面目标以及空中的低速目标,导弹装在发射巢中,拥有高爆反坦克战斗部,是 Su-25T 主要的反坦克武器,每个 APU-8 挂架可以安装 8 枚导弹
Shkval 传感器只能在白天使用,执行夜间任务时,需要用“水星”低光照度电视(LLTV)吊舱,挂在机身的中轴线挂架,它能把夜间的影像显示在 Shkval 的屏幕上,若激活了“水星”吊舱(右 CTRL + O),HUD 左侧的 TV 将变为 LTV
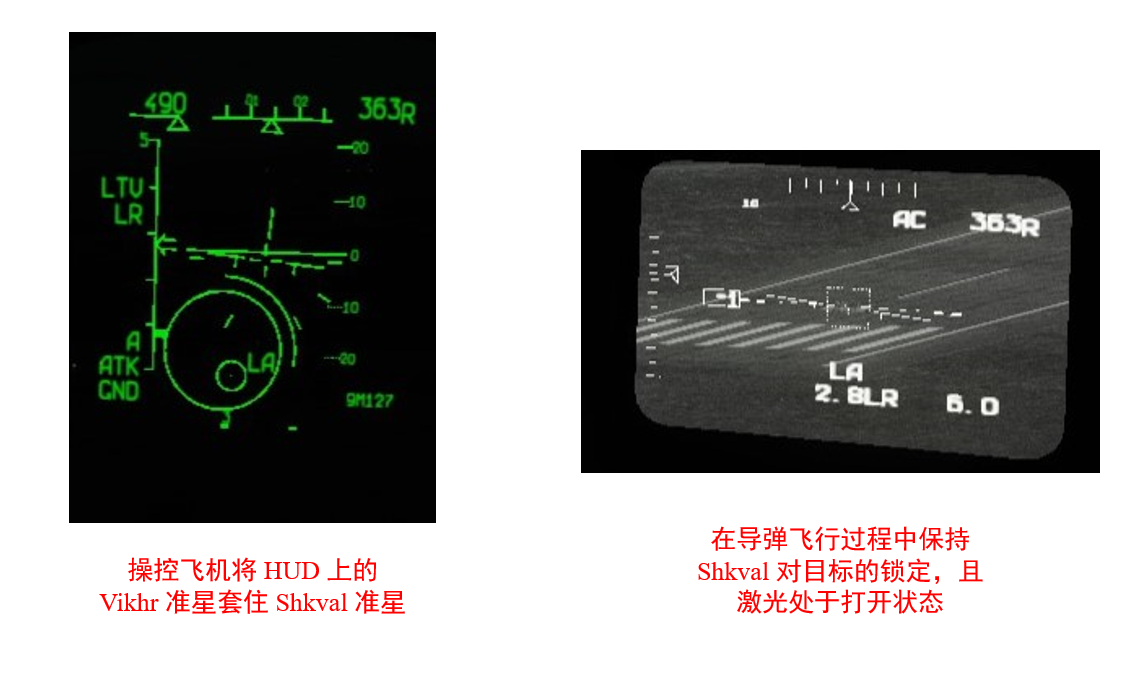
锁定目标后(按 ENTER 后),可以看到一个独特的 Vikhr 准星显示在 HUD 中间,准星的外圈是射程指示,会随着对目标射程的减少而消失;看到 AC 提示后,打开激光,并操控飞机将 HUD 上的 Vikhr 准星套住 Shkval 准星(不对准时 LA 为闪烁状态),以允许导弹捕获目标反射回来的激光,在导弹飞行过程中保持 Shkval 对目标的锁定,且激光处于打开状态(发射完即可拉起机头平飞)
激光过度使用会烧毁,因此在导弹碰撞后关闭激光(右 SHIFT + O)(可以不手动关闭,导弹碰撞后可以在 HUD 左侧看到倒计时,倒计时结束自动关闭),如果在 HUD 左侧看到 LR(ИД)符号在闪烁,表示激光已经关闭,正在冷却,在整个任务过程中,激光不能使用超过 20 分钟(累计时间)
- 反辐射导弹、RWR 和电子对抗
- RWR
SPO-15 “堡优札”雷达告警接收器,又称 RWR,位于前面板的右下角,它是一块黑色的面板,在中间是一架飞机的符号,在接收器中间的最上方,也就是机头上方的灯亮起,表示 SPO-15 已经打开;RWR 显示所有对本机的雷达探测(“照射”)的威胁,以各种符号来代表威胁的类型和方向,显示屏底部的六盏灯通知飞行员威胁雷达的类型,告警系统对敌我双方的雷达都会做出告警;告警系统可探测到雷达信号的角度范围是:水平 +/-180 度,垂直 +/-30 度;注意,RWR 只对雷达制导的威胁有告警,它不能探测红外制导导弹的威胁,对付红外弹需要依靠目视
在 RWR 中间,飞机符号内,是关于威胁高度的指示灯,如果下方的灯亮起,表示威胁低于本机,如果上方的灯亮起,表示威胁高于本机,一起亮则表示威胁的高度与本机大致相同
围绕飞机符号有一圈指示灯(灯条),它们表示主要威胁的雷达探测信号强度,用于估算威胁的距离,灯亮得越多,信号越强,威胁越靠近
灯条外的一圈绿灯表示相应的方向探测到第二个雷达威胁,即次要威胁的方位
绿灯外的一圈更大的、琥珀色的指示灯,指示主要威胁的方向,共有 10 盏,包括左右 10 度,30 度,50 度,90 度,以及左右后半球(两个灯亮起表示在两个方向之间)
在复杂的战场环境中,通常很难定义威胁的类型和方向。在这种情况下,建议使用 RWS 模式过滤,(右 Shift + R)把捕获模式中所有未锁定发射源都删除
RWR 可以发出多种告警声。可以(右 Alt + , 降低 / 右 Alt + . 升高)调整告警音量
在 RWR 的底部有一排共六盏的告警灯,指示主要威胁雷达的通用类型:
(从左至右依次是)
П–机载雷达
З–远程防空雷达:远程地空雷达有 S-300 或爱国者;
X–中程防空雷达:中程地空系统包括有 SA-11、SA-6、以及 I-HAWK;
H–短程防空雷达:通常支持自走高射炮、2S6、罗兰、以及 SA-8 等防空系统;
F–早期预警雷达
C–空中预警机
捕获一个雷达电波时,低频告警音会响起;如果雷达在锁定模式,“锁定/发射”指示灯会亮起,同时还会响起一个稳定的高频告警声;如果探测到雷达制导导弹发射,“锁定/发射”灯会闪烁,同时会响起高音调的告警声
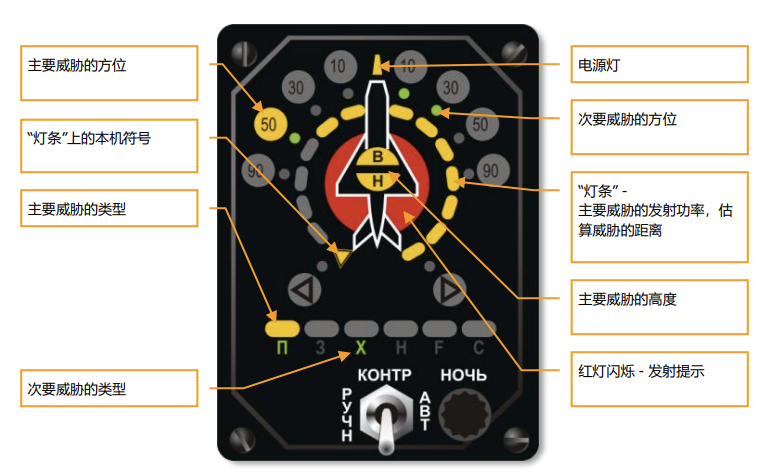
- 示例:上图 RWR 面板显示的形势
主要威胁位于左前方 50 度(10 点钟)位置,标有 50 的圆灯亮起。仪表底部椭圆形带有俄文字母“П”的黄灯,意思是“拦截机”,已经亮起。这种类型的威胁包括所有的战斗机。环绕航空器符号大半圈的指示灯(“灯条”),黄色部分显示主要威胁雷达的功率。航空器符号周围的红色圆灯亮起表示本机已被主要威胁雷达锁定。在航空器符号中间,标有俄文字母“В”和“Н”的两盏半圆形黄灯,现在都已亮起,指示威胁源相对于本机的高度。在这里,代表威胁源的高度与本机基本相同,不超过 15 度。因此,根据上图的显示信息可作出如下判断:在 10 点钟方向的主要威胁是一架战机,高度与本机差不多,已被对方锁定,根据发射功率信号灯判断,对方准备发射导弹
次要威胁位于右方 10-30 度(1-2 点钟)位置,以两盏圆形的小绿灯显示。仪表底部绿色的“Х”字母表示威胁类型为中程雷达,正在扫描本机

-
电子对抗(ECM - Electronic Countermeasures)
如果挂载有 MPS-40 电子干扰吊舱(按 E 打开 ECM,HUD 上 会显示 ECM,闪烁代表正在预热,常亮代表正常工作),打开它可以降低敌人的锁定距离
当 ECM 激活时,干扰吊舱发出的信号会告诉所有人本机的存在,因此,最好在被锁定时打开它 -
红外干扰
SPO-15 不会对红外制导的导弹系统作出告警,例如复仇者、毒刺、SA-18、SA-13 等,要降低这些红外系统的威胁,需要打开机尾的红外干扰(左 SHIFT + E) -
释放箔条与红外干扰弹
除了 ECM 与红外干扰,你还可以释放箔条与红外干扰弹作为对抗手段
箔条是一束在释放时绽放的金属条,它可以作为诱饵引诱来袭的雷达制导导弹的追踪,在释放箔条(按 INSERT)时将来袭导弹置于飞机的左翼或右翼最佳
如果发现了一枚导弹来袭而没有 RWR 告警,大概率是红外制导,机动飞机与来袭导弹成直角(三九点机动),然后释放红外干扰弹(按 DELETE) -
反辐射导弹
反辐射导弹又称反雷达导弹,是指利用敌方雷达的电磁辐射进行导引,从而摧毁敌方雷达及其载体的导弹。在电子对抗中,它是对雷达硬杀伤最有效的武器
Kh-58U 反辐射导弹是对抗雷达的得力武器,利用雷达辐射制导,在高空发射时,它的射程可高达 120 km,是对付中长射程地对空导弹阵地的首选武器,它具有一个 149 kg 重的战斗部,可以摧毁所有防空雷达
Kh-25MPU 与 Kh-58U 采用相同的弹体与发动机,但它的导引头使用了雷达辐射制导,它比 Kh-58U 小很多,在高空发射时的射程也只有 60 km,优点是能够挂载更多,最好用来攻击中短程防空系统
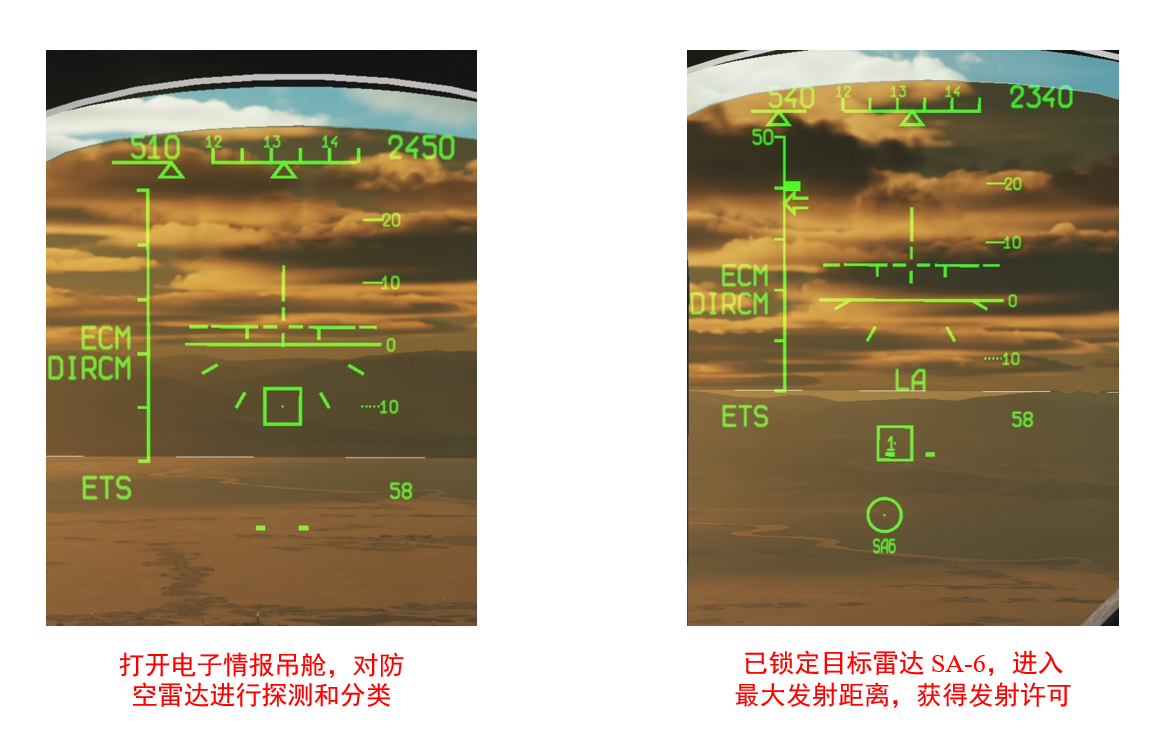
Su-25T 在飞机的中轴线挂点可以挂载一个 L-081 Fantasmagorla 电子情报吊舱,该吊舱可以对防空雷达进行探测和分类
在空对地模式下,打开电子情报吊舱(按 I 键),HUD 上出现了一个可移动的带准心的方框(按 ; . , / 上下左右移动),探测雷达的信号,用 RWR 提供的信息找到目标雷达,然后威胁标识和索引会显示在 HUD 上,把 HUD 上的目标指示框套住目标标识(方框套住菱形符号),然后锁定目标(按 ENTER),锁定后,目标的菱形符号会变成圆形,当到达最大发射距离后,HUD 上会出现 LA 的提示,这表明导弹可以发射了;先进的地空系统,例如爱国者、S-300、以及 SA-15,具有摧毁飞行中的反辐射导弹的能力,鉴于此,可能需要同时对一个高级地空阵地发射一枚以上的反辐射导弹
- 空空导弹
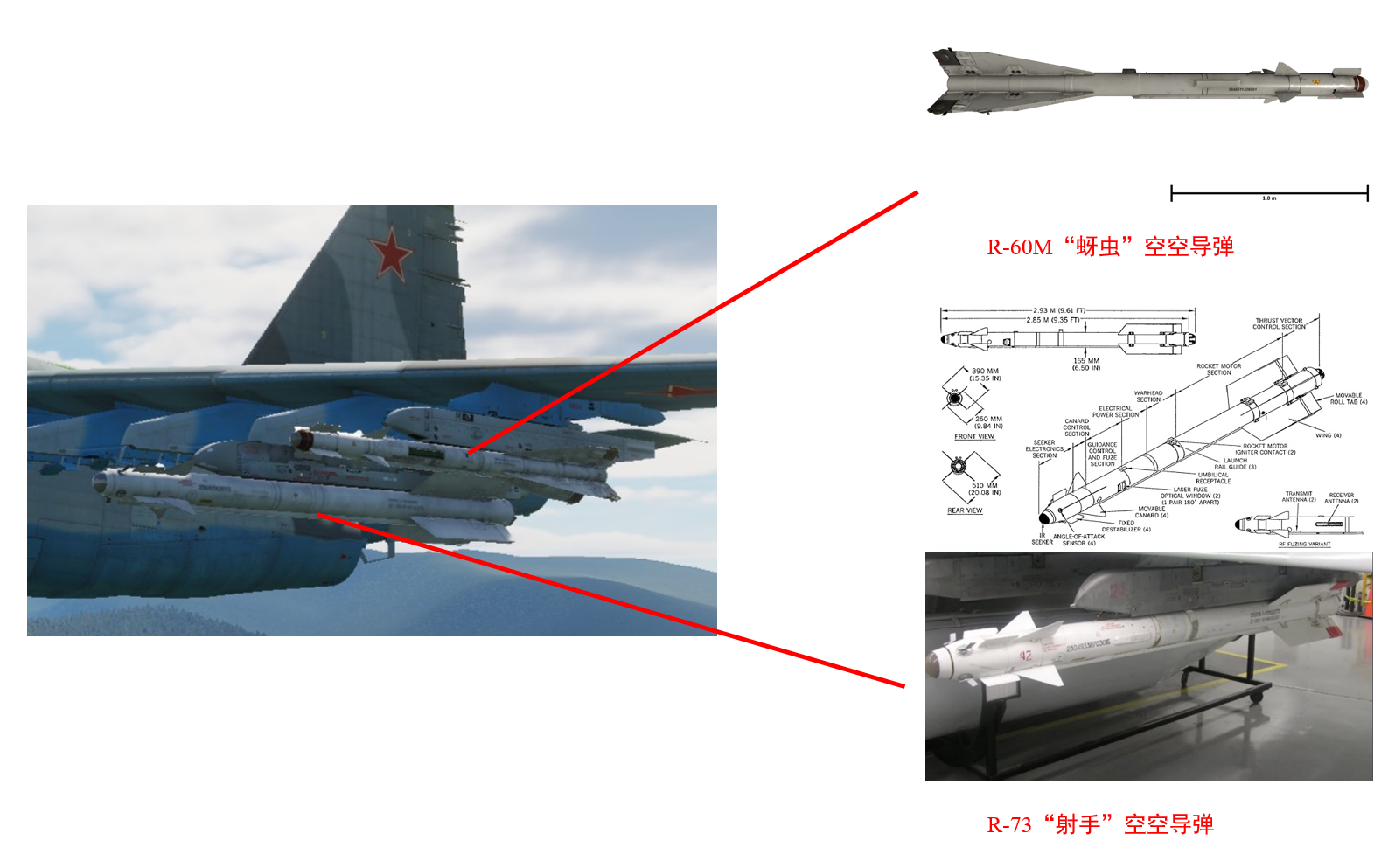
Su-25T 可以携带 R-73 和 R-60 近距空空导弹
R-60M 是近程红外制导空空导弹,最佳射程为 8 公里,该导弹有一个 3 公斤的小型膨胀杆战斗部,导引头的全方位追踪能力有限,鉴于这个小型战斗部,单单一枚 R-60M 命中并不能保证摧毁敌机,因此,在面对敌机的红外干扰弹时,可能需要发射两枚导弹来保证命中增加目标的毁伤
R-73 “射手”导弹的导引头有非常好的全方位红外搜索能力,机动性能良好,战斗部较大,最佳条件下最大射程达 30 公里,但射程限制通常是基于导引头获得锁定的能力
Su-25T 可以携带并使用导引头扫描模式发射 R-73 和 R-60 近距空空导弹。当处于此模式下时,导弹导引头开始对沿机身纵轴前方 2 度的范围进行扫描。目标必须进入导引头的视场范围(用 HUD 中间上航空器标志的中心表示)才能让导引头自动锁定目标
- 空空导弹锁定目标与发射的步骤
按 6 进入空对空模式,HUD 的左下角显示了 LNGT(Фи0),即纵向导弹瞄准模式,需要将飞机对准目标,以便导弹的红外搜索头能锁定目标,右下角若显示为 60 则表示 R-60M 空空导弹已激活,若显示为 73,则表示 R-73 导弹,按 D 键切换
将 HUD 中间的十字准心对准目标,当听到一个高音锁定音并且 “LA” 提示出现在 HUD 上时,表示导弹的导引头已经锁定目标(一旦导弹导引头获得目标,不管是否在射程内,都会发出发射许可),可按住 Space 键或扣动控制杆上的扳机发射导弹


